estimateMultiCameraParameters
Calibrate extrinsic parameters of multiple cameras with overlapping views
Since R2025a
Syntax
Description
[
estimates extrinsic parameters of multiple cameras using images of one or more
calibration patterns. The keypoints of the patterns in each image are specified
in cameraParams,imagesUsed]
= estimateMultiCameraParameters(imagePoints,worldPoints,intrinsics)imagePoints. The keypoints of the calibration patterns
in world coordinates is specified in worldPoints. The
function adjusts all image points for distortion according to the lens
distortion parameters specified in the intrinsics input.
The function also returns the images you used, imagesUsed,
to estimate the camera parameters.
Use this function to calibrate the extrinsic parameters of two cameras without
overlapping fields of view. To calibrate the extrinsic parameters of two cameras
with overlapping fields of view, use the estimateStereoBaseline function.
cameraParams = estimateMultiCameraParameters(___,Name=Value)WorldUnits="mm" sets the world units to
millimeters.
Examples
Estimate the relative position and orientation of six cameras with overlapping fields of view by using calibration images that contain a single ChArUco board.
Download the calibration images.
calibImagesURL = "https://www.mathworks.com/supportfiles/vision/data/overlapping-cameras-charuco.zip"; calibImagesDir = fullfile(pwd,"overlapping-cameras-charuco"); calibImagesZip = fullfile(pwd,"overlapping-cameras-charuco.zip"); if ~exist(calibImagesZip,"file") disp("Downloading calibration images (52 MB)...") websave(calibImagesZip,calibImagesURL); end
Downloading calibration images (52 MB)...
if ~exist(calibImagesDir,"dir") unzip(calibImagesZip,pwd) end
Specify calibration image filenames for each camera.
numCameras = 6; camDirPrefix = "Cam00"; imageFiles = cell(1,numCameras); for i = 1:numCameras camDir = fullfile(calibImagesDir,camDirPrefix+i); imds = imageDatastore(camDir); imageFiles{i} = imds.Files; end imageFiles = [imageFiles{:}];
Define the ChArUco board properties. Specify checker size and marker size in centimeters.
markerFamily = "DICT_6X6_1000"; patternDims = [5 5]; markerSize = 6.8; % in cm checkerSize = 9.15; % in cm numKeyPoints = prod(patternDims - 1); minMarkerId = 144;
Detect the key points of the ChArUco board in the calibration images.
imagePoints = detectPatternPoints(imageFiles,"charuco-board",patternDims, ... markerFamily,checkerSize,markerSize,MinMarkerID=minMarkerId);
[==================================================] 100% Elapsed time: 00:00:09 Estimated time remaining: 00:00:00
Generate the world points for the pattern.
worldPoints = patternWorldPoints("charuco-board",patternDims,checkerSize);Load the intrinsic parameters of the six cameras. These parameters have been estimated using the Using the Single Camera Calibrator App.
ld = load("sixCameraIntrinsics.mat");Perform multi-camera calibration.
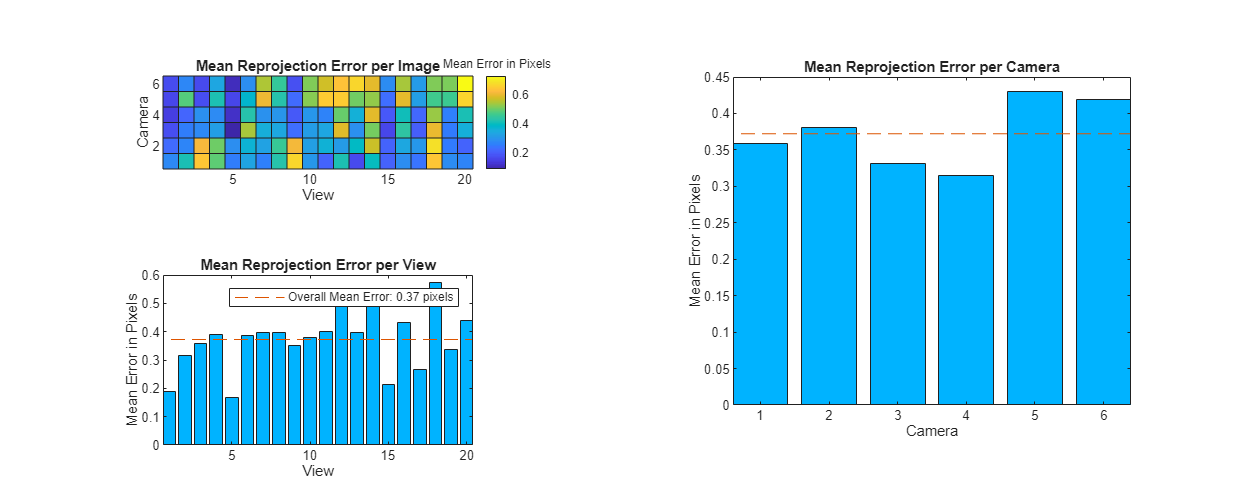
params = estimateMultiCameraParameters(imagePoints,worldPoints,ld.intrinsics,WorldUnits="cm");Visualize the calibration accuracy.
figure(Position=[100,100,1000,400]) showReprojectionErrors(params)
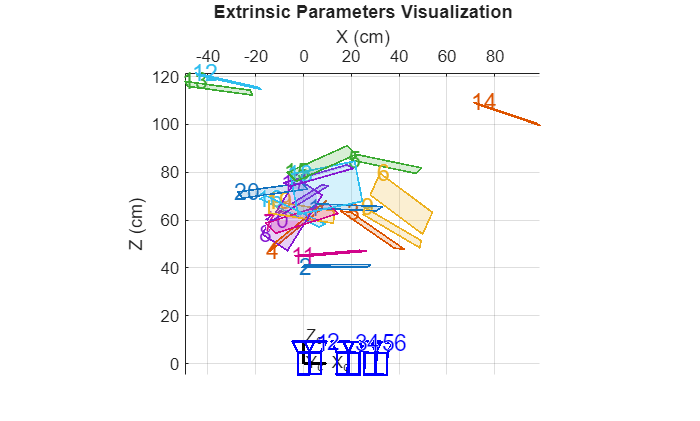
Visualize the camera extrinsic parameters.
figure showExtrinsics(params) view(2)
Calibrate multiple cameras that have some cameras sharing fields-of-view and some cameras not sharing any field-of-view.
Download the calibration images containing two ChArUco boards that were captured from six cameras as per the guidelines outlined in Prepare Cameras and Capture Images for Multi-Camera Calibration. The calibration images were captured by moving the multi-camera system around the stationary ChArUco boards.
calibImagesURL = "https://www.mathworks.com/supportfiles/vision/data/non-overlapping-cameras-charuco.zip"; calibImagesDir = fullfile(pwd,"non-overlapping-cameras-charuco"); calibImagesZip = fullfile(pwd,"non-overlapping-cameras-charuco.zip"); if ~exist(calibImagesZip,"file") disp("Downloading calibration images (68 MB)...") websave(calibImagesZip,calibImagesURL); end if ~exist(calibImagesDir,"dir") unzip(calibImagesZip,pwd) end
Specify calibration image filenames for each camera.
numCameras = 6; camDirPrefix = "Cam00"; imageFiles = cell(1,numCameras); for i = 1:numCameras camDir = fullfile(calibImagesDir,camDirPrefix+i); imds = imageDatastore(camDir); imageFiles{i} = imds.Files; end imageFiles = [imageFiles{:}];
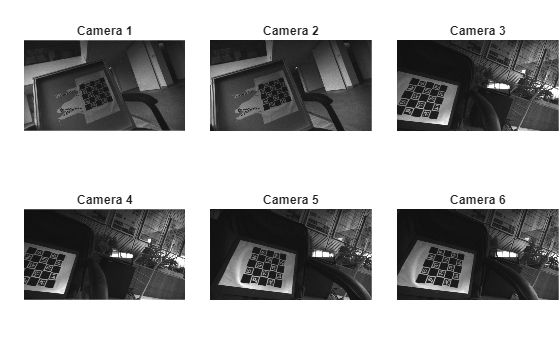
Display images captured by the six cameras from one of the views.
figure t = tiledlayout(2,3,TileSpacing="tight", Padding="tight"); for i = 1:numCameras nexttile imshow(imageFiles{25,i}) title("Camera " + i) end
Define the ChArUco board properties. Specify checker size and marker size in centimeters.
markerFamily = "DICT_6X6_1000"; patternDims = [5 5]; markerSize = 2.55; % in cm checkerSize = 3.40; % in cm
Detect the key points of the two ChArUco boards captured in the calibration images using the detectMultiPatternPoints function.
patternCount = 2; imagePoints = detectMultiPatternPoints(imageFiles,patternCount,"charuco-board",patternDims,markerFamily, ... checkerSize,markerSize);
[==================================================] 100% Elapsed time: 00:00:09 Estimated time remaining: 00:00:00
Generate the world coordinates of each pattern points in their respective pattern coordinate system.
worldPoints = patternWorldPoints("charuco-board",patternDims,checkerSize);Load the intrinsic parameters of the six cameras. These parameters have been estimated using the Using the Single Camera Calibrator App.
ld = load("sixCameraIntrinsicsNoOverlap.mat");Perform multi-camera calibration. Enable verbose mode to track the progress of the calibration process.
params = estimateMultiCameraParameters(imagePoints,worldPoints,ld.intrinsics,WorldUnits="cm",Verbose=true);Estimating multi-camera extrinsic parameters -------------------------------------------- * Number of cameras: 6 * Number of patterns: 2 * Number of views: 30 * Number of images used: 110 * Undistorting image points...done. * Grouping cameras with overlapping field-of-view....done. * Group 1: camera 3 4 5 6 * Group 2: camera 1 2 * Refining camera poses of each group: * Group 1...done. * Group 2...done. * Estimating relative pose between camera groups: * [Pair 1/1] Group 1 and 2...done. * Refining all camera poses and pattern poses...done. * Finished calibrating cameras.
Visualize the camera extrinsic parameters along with the patterns from a couple of views.
figure
showExtrinsics(params,"CameraCentric",ViewIndex=21:22)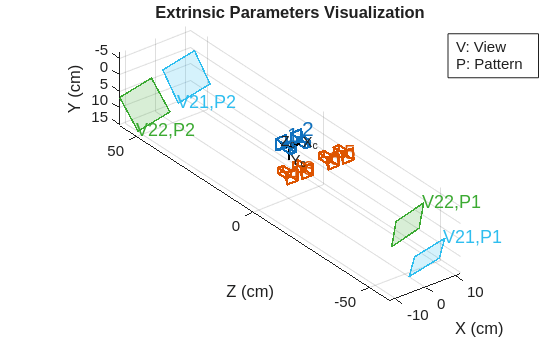
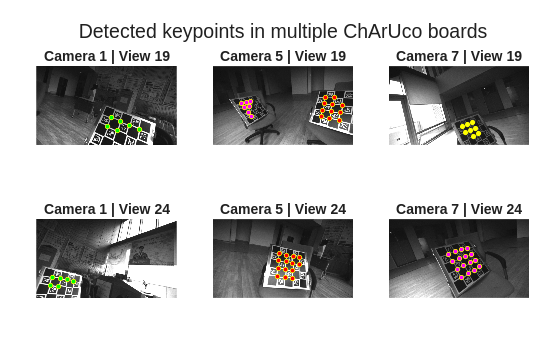
Estimate the relative position and orientation of eight cameras with overlapping fields of view by using calibration images that contain multiple ChArUco boards.
Download the calibration images.
calibImagesURL = "https://www.mathworks.com/supportfiles/vision/data/overlapping-cameras-multiple-charuco.zip"; calibImagesDir = fullfile(pwd,"overlapping-cameras-multiple-charuco"); calibImagesZip = fullfile(pwd,"overlapping-cameras-multiple-charuco.zip"); if ~exist(calibImagesZip,"file") disp("Downloading calibration images (86 MB)...") websave(calibImagesZip,calibImagesURL); end if ~exist(calibImagesDir,"dir") unzip(calibImagesZip,pwd) end
Specify calibration image filenames for each camera.
numCameras = 8; camDirPrefix = "Cam00"; imageFiles = cell(1,numCameras); for i = 1:numCameras camDir = fullfile(calibImagesDir,camDirPrefix+i); imds = imageDatastore(camDir); imageFiles{i} = imds.Files; end imageFiles = [imageFiles{:}];
Define the ChArUco board properties. Specify checker size and marker size in centimeters.
markerFamily = "DICT_6X6_1000"; patternDims = [5 5]; markerSize = 6.8; % in cm checkerSize = 9.15; % in cm
Detect the keypoints of the eight ChArUco boards captured in the calibration images using the detectMultiPatternPoints function. Specify the MinMarkerID for each pattern.
patternCount = 8; patternIDs = 144:12:228; imagePoints = detectMultiPatternPoints(imageFiles,patternCount,"charuco-board",patternDims,markerFamily, ... checkerSize,markerSize,MinMarkerID=patternIDs);
[==================================================] 100% Elapsed time: 00:00:14 Estimated time remaining: 00:00:00
Display the detected keypoints in a couple of views and three of the eight cameras.
t = tiledlayout(2,3,TileSpacing="compact",Padding="compact"); colors = ["red","green","cyan","black","magenta","yellow","blue","white"]; for viewIdx = [19,24] for camIdx = [1,5,7] nexttile imshow(imageFiles{viewIdx,camIdx}) title("Camera " + camIdx + " | View " + viewIdx) hold on for patternIdx = 1:patternCount plot(imagePoints(:,1,viewIdx,camIdx,patternIdx),imagePoints(:,2,viewIdx,camIdx,patternIdx),"yo",... MarkerSize=3,MarkerFaceColor=colors(patternIdx)) end end end title(t,"Detected keypoints in multiple ChArUco boards")
Generate the world coordinates of each pattern points in their respective pattern coordinate system.
worldPoints = patternWorldPoints("charuco-board",patternDims,checkerSize);Load the intrinsic parameters of the eight cameras. These parameters have been estimated using the Using the Single Camera Calibrator App.
ld = load("eightCameraIntrinsics.mat");Perform multi-camera calibration.
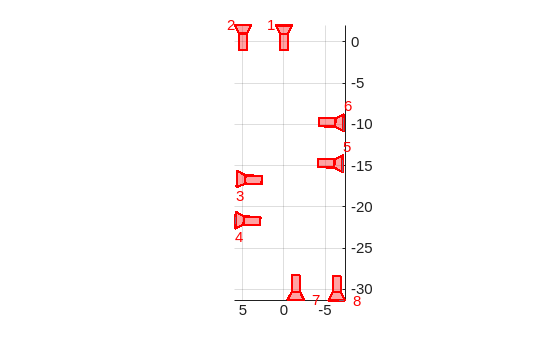
params = estimateMultiCameraParameters(imagePoints,worldPoints,ld.intrinsics,WorldUnits="cm");Plot the estimated camera poses.
figure plotCamera(params.CameraPoses) axis equal grid on view([0 1 0])
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Rameau, Francois, Jinsun Park, Oleksandr Bailo, and In So Kweon. "MC-Calib: A generic and robust calibration toolbox for multi-camera systems."Computer Vision and Image Understanding"217 (2022): 103353.
[2] Tsai, Roger Y., and Reimar K. Lenz. "A new technique for fully autonomous and efficient 3 d robotics hand/eye calibration." IEEE Transactions on robotics and automation 5, no. 3 (1989): 345-358.
Version History
Introduced in R2025aSee Also
Apps
Objects
Functions
detectPatternPoints|detectMultiPatternPoints|showExtrinsics|patternWorldPoints|showReprojectionErrors|plotCamera
Topics
- What Is Camera Calibration?
- What Is Multi-Camera Calibration?
- What Is Robot Hand-Eye Calibration?
- Calibration Patterns
- Prepare Cameras and Capture Images for Multi-Camera Calibration
- Using the Single Camera Calibrator App
- Coordinate Systems
- Evaluating the Accuracy of Single Camera Calibration
- 3-D Motion Reconstruction Using Multiple Cameras