wvarchg
Find variance change points
Description
Examples
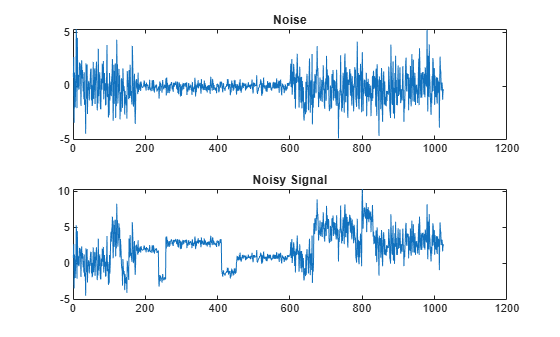
For reproducibility, set the random seed to the default value. Load the blocks wavelet test signal. Add white noise with two variance change points located at indices 180 and 600. Plot the noise and the noisy signal.
rng default x = wnoise(1,10); cp1 = 180; cp2 = 600; bb = 1.5*randn(1,length(x)); seg1 = bb(1:cp1); seg2 = bb(cp1+1:cp2)/4; seg3 = bb(cp2+1:end); wn = [seg1 seg2 seg3]; x = x+wn; subplot(2,1,1) plot(wn) title('Noise') subplot(2,1,2) plot(x) title('Noisy Signal')
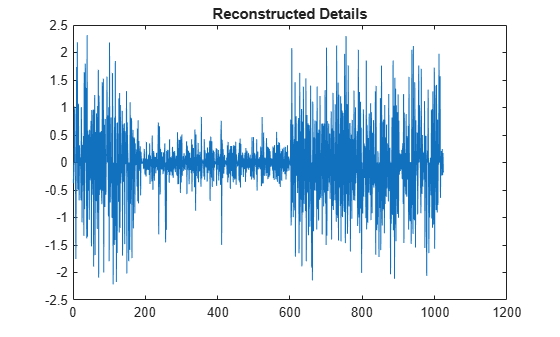
Use the db3 wavelet and do a level-1 wavelet decomposition of the signal. Reconstruct the detail coefficients. Replace the top 2% of values with the mean value of the wavelet coefficients to remove most of the signal. Plot the values.
wname = 'db3'; lev = 1; [c,l] = wavedec(x,lev,wname); det = wrcoef('d',c,l,wname,1); y = sort(abs(det)); v2p100 = y(fix(length(y)*0.98)); ind = find(abs(det)>v2p100); det(ind) = mean(det); figure plot(det) title('Reconstructed Details')
Estimate the variance change points using the wavelet coefficients.
[pts_Opt,kopt,t_est] = wvarchg(det,5);
fprintf('The estimated change points are %d and %d.',pts_Opt)The estimated change points are 181 and 601.
Input Arguments
Output Arguments
References
[1] Lavielle, M. "Detection of multiple changes in a sequence of dependent variables." Stochastic Processes and their Applications. Vol. 83, Number 1, 1999, pp. 79–102.
Version History
Introduced before R2006a