SimulationX
High-end modeling tool for simulating nonlinear, dynamic effects
Highlights
-
Vast range of model libraries, objects, analysis options, and interfaces
-
Seamless integration into existing development environments
-
Flexible parameterization, variation studies, and optimization options
-
Intuitive interface in a familiar Windows ® environment
-
Object-oriented modeling language for efficient user-defined element types
Description
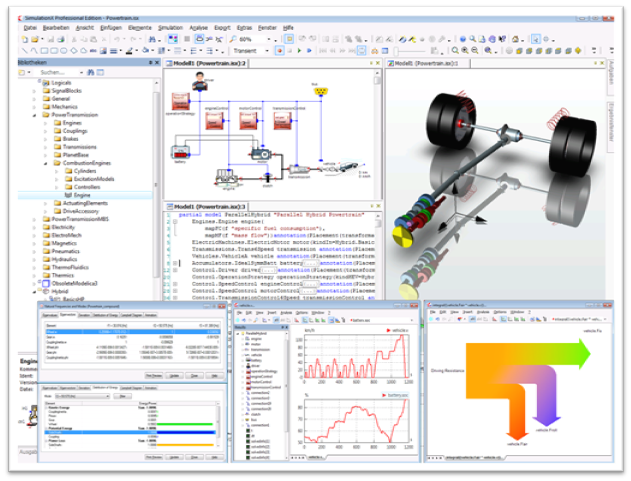
SimulationX is ITI’s multiphysics software tool for system simulation. It is used for modeling, analyzing, and optimizing complex, dynamic, nonlinear systems. Simulation models are defined interactively through a user interface. Ready-to-use model elements can be selected from domain-specific libraries.
SimulationX uses familiar symbols and input quantities. It supports the Modelica language. This open and object-oriented approach allows for the creation of user-defined elements through the included TypeDesigner. SimulationX is available in German and English.
SimulationX can interact with MATLAB® and Simulink® through C code export to Simulink, cosimulation with MATLAB and Simulink, DLL integration of MATLAB DLLs, and code import from Simulink Coder™.
C code export to Simulink transfers the functionality of a complete SimulationX model into source code for an S-function. A wizard guides the user through all necessary steps, such as defining the inputs, outputs, and parameters for the S-function. The cosimulation function uses an S-function to connect Simulink with SimulationX. The S-function’s parameters define the communication link to SimulationX. On the SimulationX side, appropriate sender and receiver blocks complete the coupling.
DLL integration of MATLAB DLLs can be used to incorporate MATLAB functions and algorithms in SimulationX. DLLs created by MATLAB Compiler™ can be integrated into SimulationX through an external function.
Code import from Simulink Coder enables SimulationX to integrate FMUs generated by the Simulink Coder. The FMI Target for Simulink Coder developed by ITI enables the user to export models from Simulink as FMUs for cosimulation. The generated FMU is fully FMI 1.0 compliant and includes the model’s functionality and the Simulink solver.
ITI GmbH
Schweriner Straße 1
01067 Dresden
Tel: +49-351-26050-200
Fax: +49-351-26050-155
info@itisim.com
https://www.simulationx.com/
Required Products
Platforms
- Windows
Support
- Consulting
- Fax
- Telephone
- Training
Product Type
- Modeling and Simulation Tools
Tasks
- Hydraulics and Pneumatics
- Mechanics and Compression Systems
- System Modeling and Simulation
- Vibration Analysis and Control
- Fluid Power
Industries
- Automotive
- Utilities and Energy