
Video Player is loading.
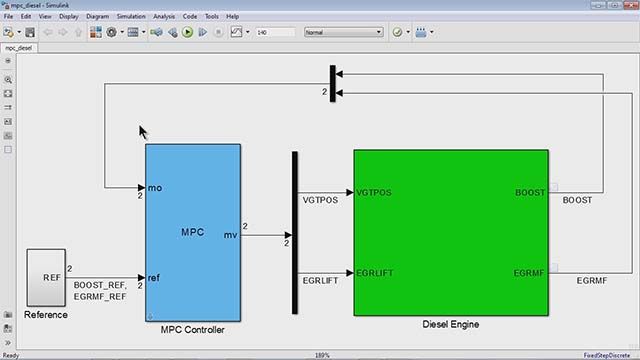
How to Implement Model Predictive Controllers
Alberto Bemporad, IMT School for Advanced Studies Lucca
Professor Alberto Bemporad, co-author of Model Predictive Control Toolbox™, talks about best practices for implementing model predictive controllers.
He answers questions such as:
- What types of optimization problems do model predictive controllers (MPCs) solve?
- What are the hardware requirements for MPCs?
- How can you make an MPC run faster?
- Is explicit MPC a silver bullet for addressing MPC computational throughput requirements?
- What techniques can you use to design MPCs that have guaranteed closed-loop stability?
Published: 17 May 2017
Featured Product
Model Predictive Control Toolbox








Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: United States.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)