Model-Based Design to Build and Validate Your Control System for an Industrial PLC using Simulink
Overview
This webinar shows the complete Model-Based Design workflow for tackling typical design challenges in the Industrial automation and Machinery industry.
We will use a crane control application example to demonstrate the following:
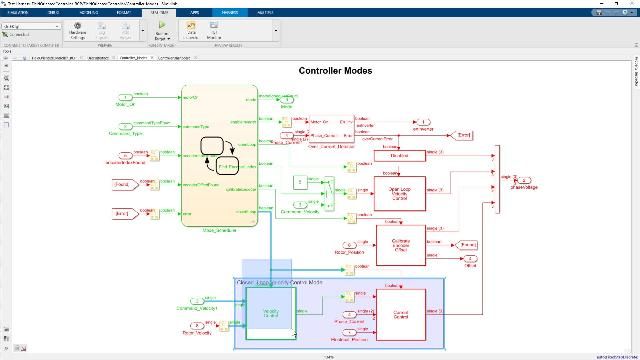
- You will see the different steps involved in the development of a new crane controller by using Simulink to model and simulate your system on desktop.
- You will also see a demonstration to automatically transfer your models from desktop to a real-time system using code generation capabilities of Simulink Coder and PLC coder.
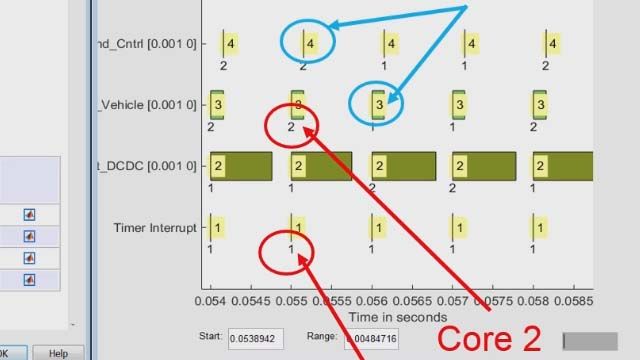
Perform HIL (hardware-in-the-loop) simulation using Simulink Real-Time and Speedgoat target hardware connected to your Industrial PLC to validate and test your control algorithm in real-time.
About the Presenter
Simon Eriksson is an Application Engineer focusing on real-time testing and production code generation and has been working at MathWorks since 2012. Simon holds an M.S. degree in Embedded Systems and Control Theory from the Royal Institute of Technology in Stockholm, Sweden.
Recorded: 7 Jun 2018
Featured Product