occlusionSensitivity
Explain network predictions by occluding the inputs
Description
scoreMap = occlusionSensitivity(net,X,channelIdx)X are occluded with a mask. The change in score is relative to
the original data without occlusion. The occluding mask is moved across the input data,
giving a change in score for each mask location. Use an occlusion sensitivity map to
identify the parts of your input data that most impact the score. Areas in the map with
higher positive values correspond to regions of input data that contribute positively to the
specified channel index. For classification tasks, specify the
channelIdx as the channel in the softmax layer corresponding to the
class label of interest.
___ = occlusionSensitivity(___,
specifies options using one or more name-value arguments in addition to the input arguments
in previous syntaxes. For example, Name=Value)Stride=50 sets the stride of the
occluding mask to 50 pixels.
Examples
Load a pretrained GoogLeNet network and the corresponding class names. This requires the Deep Learning Toolbox™ Model for GoogLeNet Network support package. If this support package is not installed, then the software provides a download link. For a list of all available networks, see Pretrained Deep Neural Networks.
[net,classNames] = imagePretrainedNetwork("googlenet");Import the image and resize to match the input size for the network.
X = imread("sherlock.jpg");
inputSize = net.Layers(1).InputSize(1:2);
X = imresize(X,inputSize);Display the image.
imshow(X)

Classify the image. To make prediction with a single observation, use the predict function. To convert the prediction scores to labels, use the scores2label function. To use a GPU, first convert the data to gpuArray. Using a GPU requires a Parallel Computing Toolbox™ license and a supported GPU device. For information on supported devices, see GPU Computing Requirements (Parallel Computing Toolbox).
if canUseGPU X = gpuArray(X); end scores = predict(net,single(X)); [label,score] = scores2label(scores,classNames);
Use occlusionSensitivity to determine which parts of the image positively influence the classification result.
channel = find(string(label) == classNames); scoreMap = occlusionSensitivity(net,X,channel);
Plot the result over the original image with transparency to see which areas of the image affect the classification score.
figure imshow(X) hold on imagesc(scoreMap,'AlphaData',0.5); colormap jet
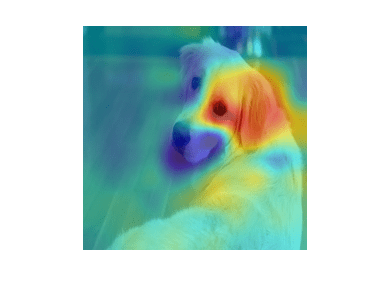
The red parts of the map show the areas which have a positive contribution to the specified label. The dog's left eye and ear strongly influence the network's prediction of golden retriever.
You can get similar results using the gradient class activation mapping (Grad-CAM) technique. Grad-CAM uses the gradient of the classification score with respect to the last convolutional layer in a network in order to understand which parts of the image are most important for classification. For an example, see Grad-CAM Reveals the Why Behind Deep Learning Decisions.
Input Arguments
Name-Value Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2019bSee Also
dlnetwork | testnet | minibatchpredict | scores2label | imageLIME | gradCAM | predict | forward
Topics
- Understand Network Predictions Using Occlusion
- Grad-CAM Reveals the Why Behind Deep Learning Decisions
- Understand Network Predictions Using LIME
- Investigate Network Predictions Using Class Activation Mapping
- Visualize Features of a Convolutional Neural Network
- Visualize Activations of a Convolutional Neural Network