localizeEgoUsingLanes
Syntax
Description
Add-On Required: This feature requires the Scenario Builder for Automated Driving Toolbox add-on.
localizedTrajectory = localizeEgoUsingLanes(trajectory,rrMap,lanedata,startLaneIndex)trajectory on a RoadRunner HD Map, rrMap, using the recorded lane boundary data
lanedata, and returns the localized trajectory
localizedTrajectory. The input startLaneIndex
specifies the lane in which the ego is positioned at the start of the simulation.
localizedTrajectory = localizeEgoUsingLanes(trajectory,rrApp,lanedata,startLaneIndex)trajectory on a scene associated
with the input RoadRunner application rrApp, and returns the localized trajectory
localizedTrajectory.
localizedTrajectory = localizeEgoUsingLanes(___,ApproxLaneWidth=laneWidth)laneWidth to detect lane change events from the lane boundary
detections.
[
additionally returns the debugging information as a structure, localizedTrajectory,info] = localizeEgoUsingLanes(___)info,
which contains information related to the lane and the ego vehicle.
Examples
Load a MAT file containing an ego trajectory object, a RoadRunner HD Map object, and a lane data object into the workspace.
load("localizeEgoUsingLanesData.mat","laneDetections","rrHDMap","egoTrajectory")
Specify the lane number in which the ego is positioned at the start of simulation, which is the first waypoint in the trajectory.
egoStartLaneIdx = 2;
Localize the ego trajectory on the RoadRunner HD Map using the lane detections and the specified ego start lane index.
localizedTrajectory = localizeEgoUsingLanes(egoTrajectory,rrHDMap,laneDetections,egoStartLaneIdx);
Smooth the localized ego trajectory.
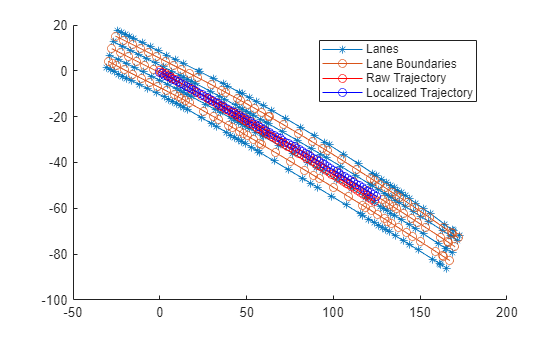
smooth(localizedTrajectory,Method="sgolay",Degree=2,SmoothingFactor=0.1)Display the raw trajectory and the localized trajectory overlaid on the road network in the RoadRunner HD Map object.
plot(rrHDMap) hold on plot3(egoTrajectory.Position(:,1),egoTrajectory.Position(:,2),egoTrajectory.Position(:,3),"ro-") plot3(localizedTrajectory.Position(:,1),localizedTrajectory.Position(:,2),localizedTrajectory.Position(:,3),"bo-") legend("Lanes","Lane Boundaries","Raw Trajectory","Localized Trajectory")
Input Arguments
Output Arguments
Version History
Introduced in R2025a