Tracking and Sensor Fusion
You can create a multi-object tracker to fuse information from radar and video camera sensors. The tracker uses Kalman filters that let you estimate the state of motion of a detected object. Use the sensor measurements made on a detected object to continuously solve for the position and velocity of that object. To track moving objects, you can use constant-velocity or constant-acceleration motion models, or you can define your own models.
Functions
Blocks
| Multi-Object Tracker | Create and manage tracks of multiple objects |
Topics
Multi-Object Tracking
- Multiple Object Tracking Tutorial
Perform automatic detection and motion-based tracking of moving objects in a video by using a multi-object tracker. - Linear Kalman Filters
Estimate and predict object motion using a Linear Kalman filter. - Extended Kalman Filters
Estimate and predict object motion using an extended Kalman filter. - Convert Detections to objectDetection Format
These examples show how to convert actual detections in the native format of the sensor intoobjectDetectionobjects.
Sensor Fusion with Synthetic Data
- Sensor Fusion Using Synthetic Radar and Vision Data
Generate a scenario, simulate sensor detections, and use sensor fusion to track simulated vehicles. - Sensor Fusion Using Synthetic Radar and Vision Data in Simulink
Implement a synthetic data simulation for tracking and sensor fusion in Simulink® with Automated Driving Toolbox™.
Code Generation
- Code Generation for Tracking and Sensor Fusion
Generate C code for a MATLAB® function that processes data recorded from a test vehicle and tracks the objects around it. - Generate Code for a Track Fuser with Heterogeneous Source Tracks
Generate code for a track-level fusion algorithm where tracks originate from heterogeneous sources with different state definitions.
Featured Examples

Extended Object Tracking of Highway Vehicles with Radar and Camera
Track objects whose dimensions span multiple sensor resolution cells.
Extended Object Tracking of Highway Vehicles with Radar and Camera in Simulink
Track highway vehicles around an ego vehicle in Simulink®. In this example, you use multiple extended object tracking techniques to track highway vehicles and evaluate their tracking performance. This example closely follows the Extended Object Tracking of Highway Vehicles with Radar and Camera (Sensor Fusion and Tracking Toolbox) MATLAB® example.
Grid-Based Tracking in Urban Environments Using Multiple Lidars
Track moving objects by using multiple lidar sensors and a grid-based tracker.
Grid-based Tracking in Urban Environments Using Multiple Lidars in Simulink
Track moving objects with multiple lidars using a grid-based tracker in Simulink. You use the Grid-Based Multi Object Tracker (Sensor Fusion and Tracking Toolbox) Simulink block to define the grid-based tracker. This Grid-based tracker uses dynamic occupancy grid map as an intermediate representation of the environment. This example closely follows the Grid-Based Tracking in Urban Environments Using Multiple Lidars (Sensor Fusion and Tracking Toolbox) MATLAB® example.

Track-to-Track Fusion for Automotive Safety Applications
Fuse tracks from two vehicles to provide a more comprehensive estimate of the environment than seen by each vehicle.

Track-to-Track Fusion for Automotive Safety Applications in Simulink
Fuse tracks from multiple vehicles in the Simulink environment.

Track Vehicles Using Lidar: From Point Cloud to Track List
Track vehicles from lidar data using a joint probabilistic data association (JPDA) tracker and an interacting multiple model (IMM) approach.
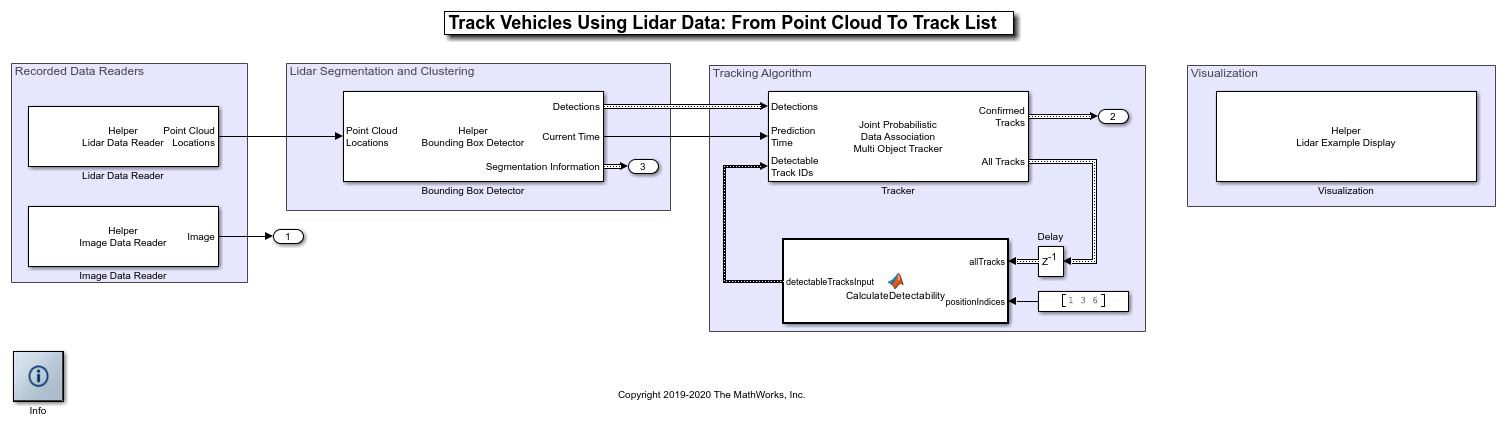
Track Vehicles Using Lidar Data in Simulink
Track vehicles from lidar data using a JPDA tracker and IMM approach in the Simulink environment.
Track Multiple Lane Boundaries with a Global Nearest Neighbor Tracker
Design and test a multiple-lane tracking algorithm.

Track-Level Fusion of Radar and Lidar Data
Fuse tracks obtained by radar and lidar sensor measurements.

Track-Level Fusion of Radar and Lidar Data in Simulink
Fuse tracks obtained by radar and lidar sensor measurements in Simulink.
Object Tracking and Motion Planning Using Frenet Reference Path
Dynamically replan the motion of an autonomous vehicle based on the estimate of the surrounding environment. You use a Frenet reference path and a joint probabilistic data association (JPDA) tracker to estimate and predict the motion of other vehicles on the highway. Compared to the Highway Trajectory Planning Using Frenet Reference Path example, you use these estimated trajectories from the multi-object tracker in this example instead of ground truth for motion planning.

Forward Vehicle Sensor Fusion
Simulate sensor fusion and tracking in a 3D simulation environment for automated driving applications.

Automate Testing for Forward Vehicle Sensor Fusion
Automate the testing of a forward vehicle sensor fusion component and generated code.

Automate Real-Time Testing for Forward Vehicle Sensor Fusion
Deploy and test forward vehicle sensor fusion component of highway lane following system in real-time.

Surround Vehicle Sensor Fusion
Design sensor fusion and tracking component to detect vehicles using multiple vision and radar sensors, and generate fused tracks for surround view analysis.
Asynchronous Sensor Fusion and Tracking with Retrodiction
Construct an event-based sensor fusion and tracking model in Simulink.
Highway Vehicle Tracking with Multipath Radar Reflections
Assess and mitigate the impact of multipath radar reflections when tracking highway vehicles using an extended object tracker.
Extended Target Tracking with Multipath Radar Reflections in Simulink
Model and mitigate multipath radar reflections in a highway driving scenario in Simulink®. It closely follows the Highway Vehicle Tracking with Multipath Radar Reflections MATLAB® example.
Processor-in-the-Loop Verification of JPDA Tracker for Automotive Applications
Generate embedded code for a joint probabilistic data association (JPDA) tracker and verify it using processor-in-the-loop (PIL) simulations on a STM32 Nucleo board with 1 MB RAM and 2 MB flash memory. In this example, you configure the JPDA tracker to process detections from a camera and a radar sensor mounted in front of an ego vehicle in highway scenarios. For PIL simulations, you use simulated detections to verify the tracking and computational performance of the generated code.