initvisionbboxkf
Create constant-velocity linear Kalman filter for 2-D axis-aligned bounding box from detection report
Since R2024a
Description
filter = initvisionbboxkf(detection)detection report. For more
details, see trackingKF.
filter = initvisionbboxkf(detection,Name=Value)filter =
initvisionbboxkf(detection,FrameRate=45) creates a Kalman filter object with a
frame rate of 45 frames per second.
Examples
Create a constant-velocity linear Kalman filter object, trackingKF, based on a 2-D bounding box, from a tracking video containing an initial detection report.
Initialize Kalman Filter
Define a bounding box with its lower left corner located at (200, 400), a width of 100 pixels and a height of 120 pixels. Create an objectDetection object based on this bounding box at the first frame.
bbox = [200 400 100 120]; % [x y width height]
detection = objectDetection(0,bbox);Specify the frame rate of the tracking video as 20 frames per second and the frame size as 800 by 600 pixels. Create and initialize a trackingKF object using the detection object, frame rate, and resolution.
framerate = 20; framesize = [800 600]; filter = initvisionbboxkf(detection,FrameRate=framerate,FrameSize=framesize)
filter =
trackingKF with properties:
State: [8×1 double]
StateCovariance: [8×8 double]
MotionModel: 'Custom'
StateTransitionModel: [8×8 double]
ControlModel: []
ProcessNoise: [8×8 double]
MeasurementModel: [4×8 double]
MeasurementNoise: [4×4 double]
MaxNumOOSMSteps: 0
EnableSmoothing: 0
Predict and Correct Next State
Create a new bounding box, bbox2, at the second frame. Its lower left corner is located at (245, 275) while its width increases to 130 pixels and its height increases to 160 pixels.
bbox2 = [245 275 130 160];
Predict the filter state of the second frame and correct it using bbox2. For more information about state prediction and correction, see objectDetection.
estimatedState2 = predict(filter); correctedState2 = correct(filter,bbox2);
Predict and display the filter state of the third frame.
estimatedState3 = predict(filter) % [x vx y vy w vw h vh]'estimatedState3 = 8×1
235.1562
178.1250
302.3438
-494.7917
123.4375
118.7500
151.2500
158.3333
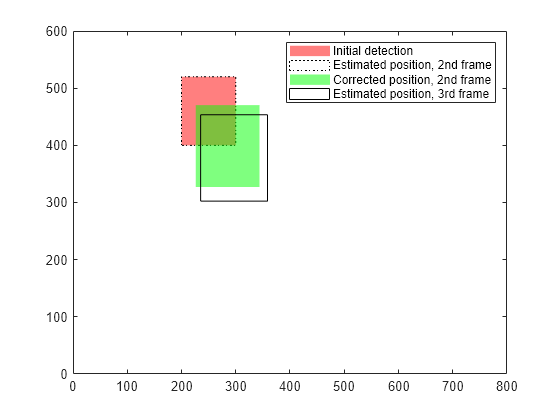
Plot the initial bounding box, the corrected bounding box position for the second frame, and the estimated bounding box positions for the second and third frames in the same figure. The estimated position for the second frame overlaps with the initial detection because the velocity of the initialized filter is null by default.
figure xlim([0 framesize(1)]) ylim([0 framesize(2)]) hold on box on targetplot(detection.Measurement,"r","none",0.5) targetplot(estimatedState2,"w",":",0) targetplot(correctedState2,"g","none",0.5) targetplot(estimatedState3,"w","-",0) legend(["Initial detection" "Estimated position, 2nd frame" "Corrected position, 2nd frame" "Estimated position, 3rd frame"])
function targetplot(state,fc,ls,fa) if length(state)>4 X=[state(1),state(1),state(1)+state(5),state(1)+state(5)]; Y=[state(3),state(3)+state(7),state(3)+state(7),state(3)]; else X=[state(1),state(1),state(1)+state(3),state(1)+state(3)]; Y=[state(2),state(2)+state(4),state(2)+state(4),state(2)]; end patch(XData=X,YData=Y,FaceColor=fc,LineStyle=ls,FaceAlpha=fa); end
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
You can use
initvisionbboxkfas theFilterInitializationFcnproperty of thetrackerGNN,trackerJPDA, andtrackerTOMHTSystem objects.When using this function to initialize a
trackingKFobject, it employs a 1-D constant-velocity model with additive process noise. This model updates the system state for each bounding box element, p, and its time derivative, v using the following equation:where T is the inverse of the
FrameRate, the process noise w(k) has a covariance:which can be written after normalization as
The scaling factor γ equals the minimum value of the frame size. You can adjust the unitless, time-independent noise intensity, qp,v, by using the
NoiseIntensityinput argument. G is the lower-triangular Cholesky factor of the noise covariance, as returned by thecholfunction whentriangleis set to'lower'. G' is the transpose of G.
References
[1] J. Krejčí, O. Kost, O. Straka, and J. Duník, "Bounding Box Dynamics in Visual Tracking: Modeling and Noise Covariance Estimation," 2023 26th International Conference on Information Fusion (FUSION), IEEE, 2023, pp. 1–6.
Extended Capabilities
Version History
Introduced in R2024a