gather
Description
Examples
Create a blocked point cloud from a LAZ file.
pcfile = fullfile(toolboxdir("lidar"),"lidardata", ... "las","aerialLidarData.laz"); bpc = blockedPointCloud(pcfile,[50 50]);
Collect the blocks and point attributes of the blocked point cloud, and assemble them into a pointCloud object and lidarPointAttributes object, respectively.
[ptCloud,ptAttr] = gather(bpc);
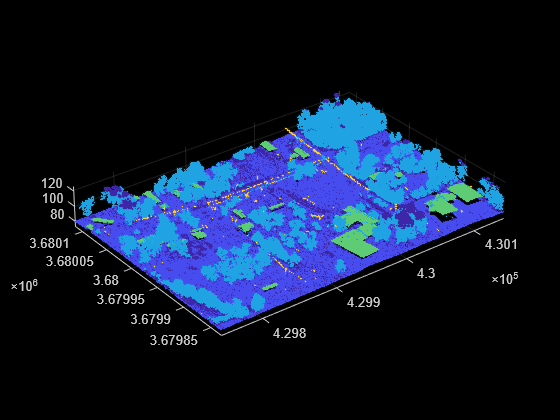
Display the assembled point cloud. Specify the color based on the classification attributes.
pcshow(ptCloud.Location,ptAttr.Classification)