Inertial Sensor Fusion
Inertial sensor fusion uses filters to improve and combine readings from IMU, GPS, and other sensors. To model specific sensors, see Sensor Models.
For simultaneous localization and mapping, see SLAM.
Functions
Blocks
| AHRS | Orientation from accelerometer, gyroscope, and magnetometer readings |
| Complementary Filter | Estimate orientation using complementary filter (Since R2023a) |
| IMU Filter | Estimate orientation using IMU Filter (Since R2023b) |
| ecompass | Compute orientation from accelerometer and magnetometer readings (Since R2024a) |
Topics
Sensor Fusion
- Choose Inertial Sensor Fusion Filters
Applicability and limitations of various inertial sensor fusion filters. - Estimate Orientation Through Inertial Sensor Fusion
This example shows how to use 6-axis and 9-axis fusion algorithms to compute orientation. - Estimate Orientation with a Complementary Filter and IMU Data
This example shows how to stream IMU data from an Arduino board and estimate orientation using a complementary filter. - Logged Sensor Data Alignment for Orientation Estimation
This example shows how to align and preprocess logged sensor data. - Lowpass Filter Orientation Using Quaternion SLERP
This example shows how to use spherical linear interpolation (SLERP) to create sequences of quaternions and lowpass filter noisy trajectories. - Pose Estimation from Asynchronous Sensors
This example shows how you might fuse sensors at different rates to estimate pose. - Custom Tuning of Fusion Filters
Use thetunefunction to optimize the noise parameters of several fusion filters, including theahrsfilterobject. - Fuse Inertial Sensor Data Using insEKF-Based Flexible Fusion Framework
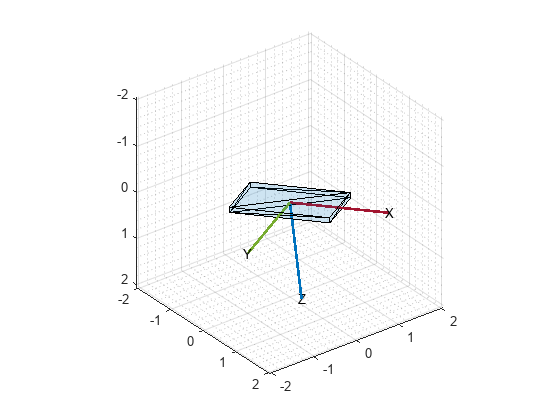
TheinsEKFfilter object provides a flexible framework that you can use to fuse inertial sensor data. - Autonomous Underwater Vehicle Pose Estimation Using Inertial Sensors and Doppler Velocity Log
This example shows how to fuse data from a GPS, Doppler Velocity Log (DVL), and inertial measurement unit (IMU) sensors to estimate the pose of an autonomous underwater vehicle (AUV) shown in this image.
Applications
- Binaural Audio Rendering Using Head Tracking
Track head orientation by fusing data received from an IMU, and then control the direction of arrival of a sound source by applying head-related transfer functions (HRTF). - Tilt Angle Estimation Using Inertial Sensor Fusion and ADIS16505
Get data from Analog Devices ADIS16505 IMU sensor and use sensor fusion on the data to compute the tilt of the sensor. (Since R2024a) - Wireless Data Streaming and Sensor Fusion Using BNO055
This example shows how to get data from a Bosch BNO055 IMU sensor through an HC-05 Bluetooth® module, and to use the 9-axis AHRS fusion algorithm on the sensor data to compute orientation of the device.
Featured Examples

IMU and GPS Fusion for Inertial Navigation
How you might build an IMU + GPS fusion algorithm suitable for unmanned aerial vehicles (UAVs) or quadcopters.

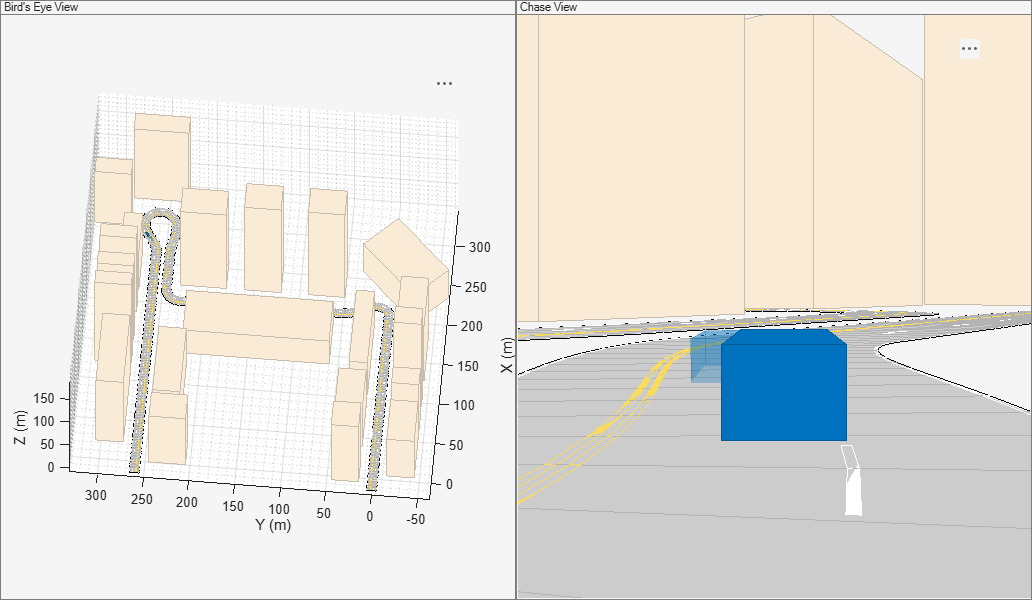
Estimate Position and Orientation of a Ground Vehicle
Estimate the position and orientation of ground vehicles by fusing data from an inertial measurement unit (IMU) and a global positioning system (GPS) receiver.

Ground Vehicle Pose Estimation for Tightly Coupled IMU and GNSS
Estimate the position and orientation of a ground vehicle by building a tightly coupled extended Kalman filter and using it to fuse sensor measurements. A tightly coupled filter fuses inertial measurement unit (IMU) readings with raw global navigation satellite system (GNSS) readings. In contrast, a loosely coupled filter fuses IMU readings with filtered GNSS receiver readings.
Estimate Orientation and Height Using IMU, Magnetometer, and Altimeter
Fuse data from a 3-axis accelerometer, 3-axis gyroscope, 3-axis magnetometer (together commonly referred to as a MARG sensor for Magnetic, Angular Rate, and Gravity), and 1-axis altimeter to estimate orientation and height.
Estimate Phone Orientation Using Sensor Fusion
MATLAB® Mobile™ reports sensor data from the accelerometer, gyroscope, and magnetometer on Apple or Android® mobile devices. Raw data from each sensor or fused orientation data can be obtained. This example shows how to compare the fused orientation data from the phone with the orientation estimate from the ahrsfilter object.
Visual-Inertial Odometry Using Synthetic Data
Estimate the pose (position and orientation) of a ground vehicle using an inertial measurement unit (IMU) and a monocular camera. In this example, you:

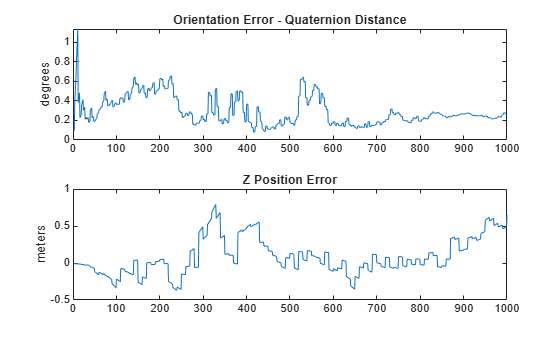
Automatic Tuning of the insfilterAsync Filter
The insfilterAsync object is a complex extended Kalman filter that estimates the device pose. However, manually tuning the filter or finding the optimal values for the noise parameters can be a challenging task. This example illustrates how to use the tune function to optimize the filter noise parameters.

Design Fusion Filter for Custom Sensors
Introduces how to customize sensor models used with an insEKF object.

Estimate Orientation Using GPS-Derived Yaw Measurements
Define and use a custom sensor model for the insEKF object along with built-in sensor models. Using a custom yaw angle sensor, an accelerometer, and a gyroscope, this example uses the insEKF object to determine the orientation of a vehicle. You use the velocity from a GPS receiver to compute the yaw of the vehicle. Following a similar approach as shown in this example, you can develop custom sensor models for your own sensor fusion applications.

Estimate Orientation Using AHRS Filter and IMU Data in Simulink
Stream IMU data from sensors connected to Arduino® board and estimate orientation using AHRS filter and IMU sensor.