toaposest
Syntax
Description
Examples
Use received signals from five anchors having known positions to perform FFT-based TOA estimation. Obtain TDOA measurements,and then perform two-step WLLS-based TDOA positioning. Use the data from the TOAEstimatorExampleData file, which contains these variables:
Variable | Definition |
toa | Anchor TOAs |
N | Number of sub-bands |
M | Number of channel samples |
freqspacing | Frequency spacing |
npow | Noise power |
anchorpos | Anchor positions |
tgtpos | Actual target position |
First, load the data from the mat-file:
load TOAEstimatorExampleDataCreate an exponential signal in a noise-free frequency-domain channel.
expsignal = exp(-1j*2*pi*(1:N)'*(freqspacing*toa));
Create frequency-domain channel estimate with added Gaussian white noise.
X = cell(1,L); for l = 1:L X{l} = expsignal(:,l)*ones(1,M) + ... sqrt(npow/2)*(randn(N,M)+1j*randn(N,M)); end
Configure TOA estimator for MUSIC-based spectrum analysis.
toaEstimator = phased.TOAEstimator(Measurement="TOA", ... SpectrumMethod="MUSIC",VarianceOutputPort=true, ... NoisePower=npow,ForwardBackwardAveraging=true, ... SpatialSmoothing=ceil(N/2));
Perform TOA estimation.
[toaest,toavar] = toaEstimator(X,freqspacing);
Perform TOA-based position estimation.
[tgtposest,tgtposcov] = toaposest(toaest,toavar,anchorpos);
Compute the RMSE target position estimate.
rmsepos = rmse(tgtposest,tgtpos); disp(["RMS TOA positioning error = ", num2str(rmsepos), " meters."])
"RMS TOA positioning error = " "0.10669" " meters."
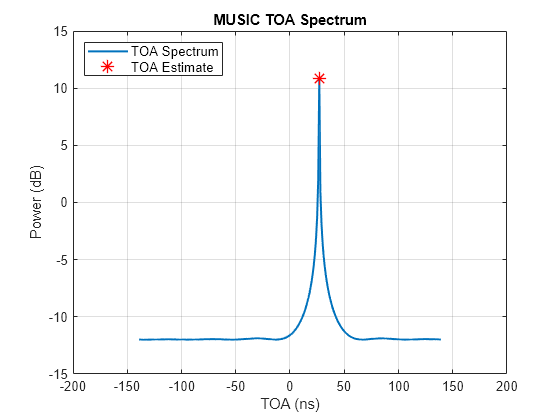
Plot the TOA spectrum.
[toaGrid,toaSpectrum,toaEst] = plotTOASpectrum( ... toaEstimator,freqspacing,AnchorIndex=1, ... MaxDelay=200e-9);
Input Arguments
Output Arguments
Algorithms
References
[1] Zekavat, Seyed A., and R. Michael Buehrer, eds. Handbook of Position Location: Theory, Practice, and Advances. IEEE Series on Mobile & Digital Communication. Hoboken, New Jersey: Wiley-IEEE Press, 2019.
[2] Molisch, Andreas F. Wireless Communications: From Fundamentals to Beyond 5G. Third edition. IEEE Press. Hoboken, NJ: Wiley-IEEE Press, 2023.
[3] Chan, Y.T., and K.C. Ho. “A Simple and Efficient Estimator for Hyperbolic Location.” IEEE Transactions on Signal Processing 42, no. 8 (August 1994): 1905–15. https://doi.org/10.1109/78.301830.
[4] Stoica, P., and Arye Nehorai. “MUSIC, Maximum Likelihood, and Cramer-Rao Bound.” IEEE Transactions on Acoustics, Speech, and Signal Processing 37, no. 5 (May 1989): 720–41. https://doi.org/10.1109/29.17564.
Extended Capabilities
Version History
Introduced in R2024a