fircls
Constrained-least-squares FIR multiband filter design
Description
b = fircls(n,f,amp,up,lo)n + 1 linear phase FIR filter. The
frequency-magnitude characteristics of this filter match those given by vectors
f and amp. up and
lo are vectors with the same length as amp. They
define the upper and lower bounds for the frequency response in each band.
Examples
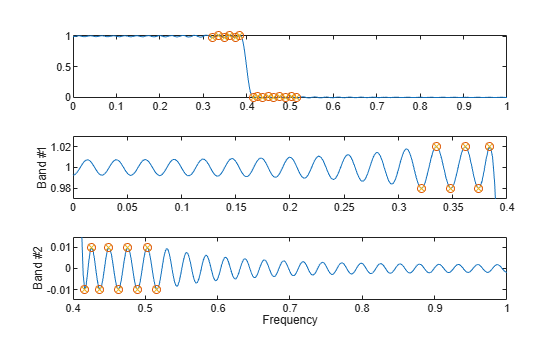
Design a 150th-order lowpass filter with a normalized cutoff frequency of rad/sample. Specify a maximum absolute error of 0.02 in the passband and 0.01 in the stopband. Display the design error and magnitude responses of the filter. The bound violations denote the iterations of the procedure as the design converges.
n = 150;
f = [0 0.4 1];
a = [1 0];
up = [1.02 0.01];
lo = [0.98 -0.01];
b = fircls(n,f,a,up,lo,"both");Bound Violation = 0.0788344298966 Bound Violation = 0.0096137744998 Bound Violation = 0.0005681345753 Bound Violation = 0.0000051519942 Bound Violation = 0.0000000348656 Bound Violation = 0.0000000006231
Input Arguments
Output Arguments
Algorithms
The fircls function uses an iterative least-squares algorithm to obtain
an equiripple response. The algorithm is a multiple exchange algorithm that uses Lagrange
multipliers and Kuhn-Tucker conditions on each iteration.
References
[1] Selesnick, I. W., M. Lang, and C. S. Burrus. “Constrained Least Square Design of FIR Filters without Specified Transition Bands.” Proceedings of the 1995 International Conference on Acoustics, Speech, and Signal Processing. Vol. 2, 1995, pp. 1260–1263.
[2] Selesnick, I. W., M. Lang, and C. S. Burrus. “Constrained Least Square Design of FIR Filters without Specified Transition Bands.” IEEE® Transactions on Signal Processing. Vol. 44, Number 8, 1996, pp. 1879–1892.