normalRotation
Compute transform for rotation of normal to plane
Description
tform = normalRotation(model,referenceVector)referenceVector. model
is a planeModel.
Examples
Construct a velodyneFileReader object.
veloReader = velodyneFileReader('lidarData_ConstructionRoad.pcap','HDL32E');
Read the first frame of lidar data.
frameNumber = 1; ptCloud = readFrame(veloReader,frameNumber);
Find the ground plane.
maxDistance = 0.4; referenceVector = [0 0 1]; groundPlane = pcfitplane(ptCloud,maxDistance,referenceVector);
Transform the ground plane such that it is parallel to the X-Y plane.
tform = normalRotation(groundPlane,referenceVector);
Transform the point cloud.
ptCloudOut = pctransform(ptCloud,tform);
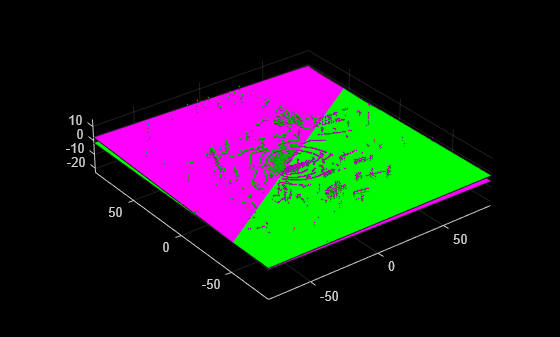
Display the original and transformed point cloud.
planeParams = groundPlane.Parameters * tform.T; transformedPlane = planeModel(planeParams); figure; pcshowpair(ptCloudOut,ptCloud); hold on; plot(groundPlane, 'Color', 'magenta'); plot(transformedPlane, 'Color', 'green');