Structure from Motion
Structure from motion (SfM) is the process of estimating the 3-D structure of a scene from a set of 2-D images taken from different viewpoints. Computer Vision Toolbox™ provides an end-to-end SfM pipeline, including feature detection, matching, camera pose estimation, triangulation, and bundle adjustment. These capabilities are essential for applications such as 3-D mapping, photogrammetry, and autonomous navigation.
For a step-by-step comprehensive walkthrough of an incremental structure-from-motion pipeline, see the Structure from Motion from Multiple Views example series. The example series shows how to create a view graph from camera views using the bag-of-features approach, refine the view graph using geometric constraints, initialize the 3-D reconstruction by selecting a robust initial view pair, and then integrate the rest of the camera views to reconstruct the complete 3-D scene. For information on how to use the sparse 3-D point cloud of a scene and generate a dense 3-D mesh, see the Dense 3-D Reconstruction of Asteroid Surface from Image Sequence example.
For dense reconstruction and novel view synthesis, the toolbox supports Neural
Radiance Fields (NeRF). Use the trainNerfacto function to train a NeRF model on your collection
of images and generate novel views. You can then use the point cloud to generate
a 3-D mesh using the pc2surfacemesh (Lidar Toolbox) function.
Functions
Topics
Incremental Structure from Motion
- Structure from Motion from Multiple Views
Estimate 3-D structure of a scene from a set of 2-D views using incremental structure from motion. (Since R2026a)
Basics
- What Is Structure from Motion?
Estimate three-dimensional structures from two-dimensional image sequences. - Coordinate Systems
Specify pixel Indices, spatial coordinates, and 3-D coordinate systems. - Point Feature Types
Choose functions that return and accept points objects for several types of features. - Local Feature Detection and Extraction
Learn the benefits and applications of local feature detection and extraction.
Featured Examples

Structure from Motion from Multiple Views
Estimate 3-D structure of a scene from a set of 2-D views using incremental structure from motion.
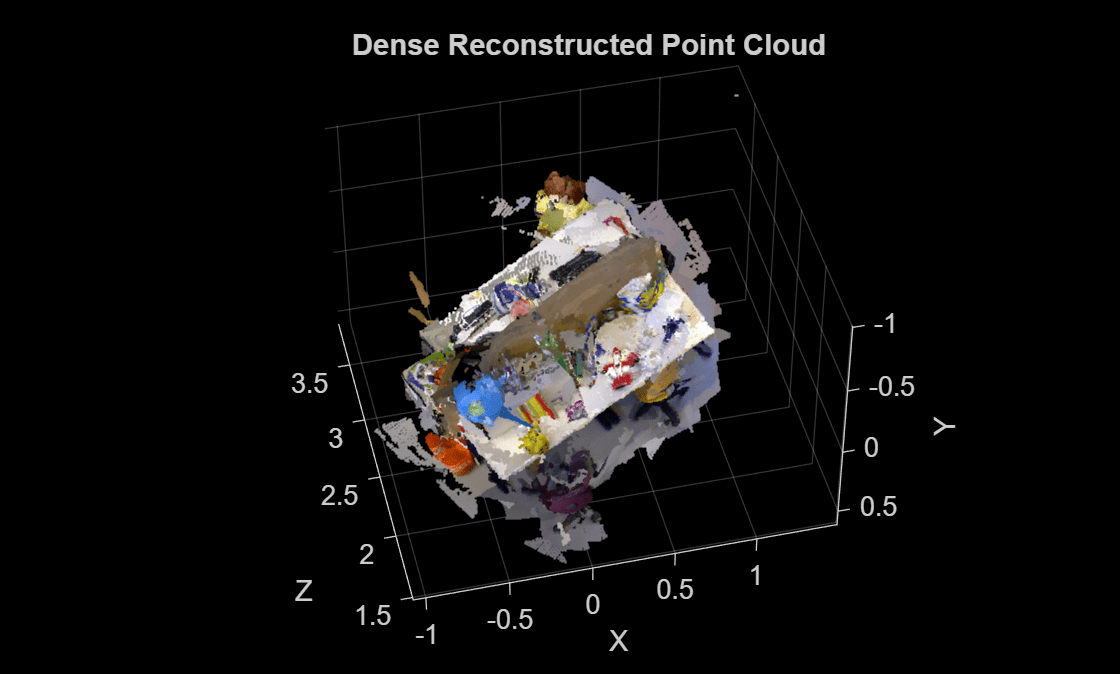
Dense 3-D Reconstruction from Multiple Views Using RAFT Optical Flow
Reconstruct dense 3-D scene by augmenting sparse Structure-from-Motion (SfM) point cloud with dense pixel correspondences estimated using RAFT optical flow.
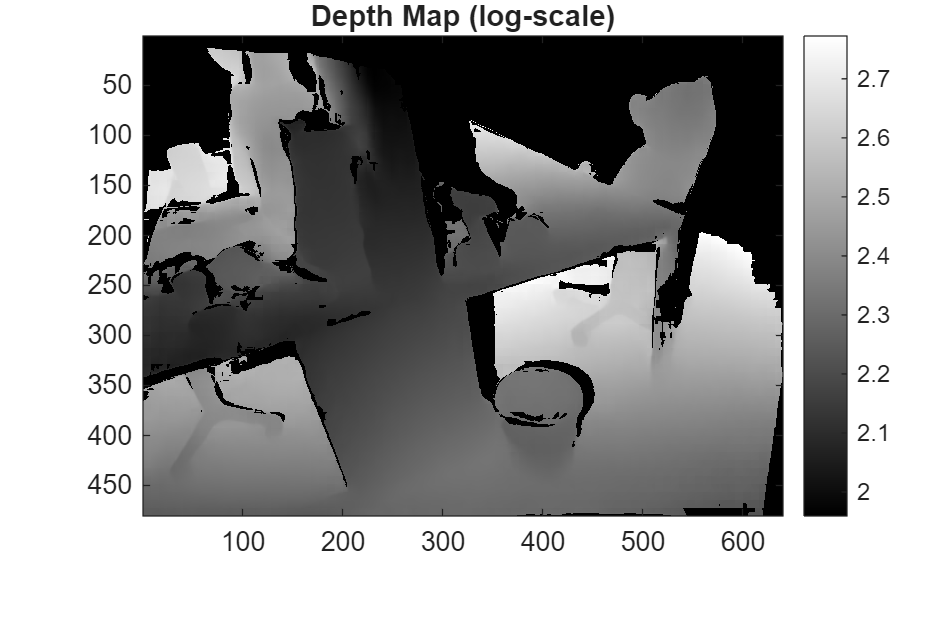
Dense 3-D Reconstruction from Two Views Using RAFT Optical Flow
Perform dense 3-D scene reconstruction from two monocular images showing different viewpoints using RAFT optical flow model.
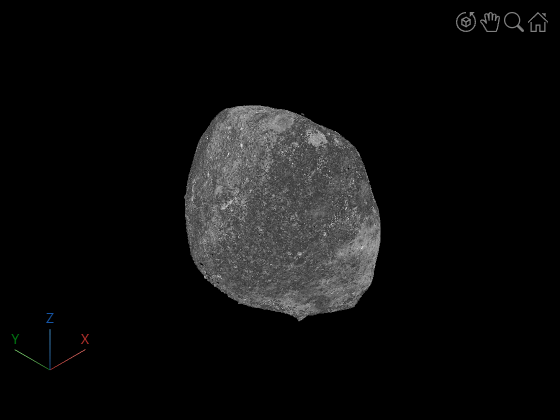
Dense 3-D Reconstruction of Asteroid Surface from Image Sequence
Reconstruct dense 3-D point cloud and continuous surface mesh for an asteroid using 2-D images.
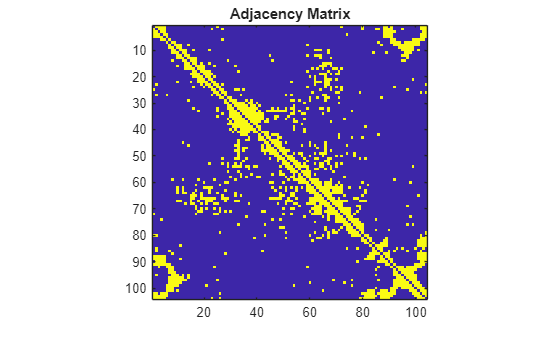
Create View Graph Using Bag of Features
Extract features from images and build a view graph based on visual similarity using bag-of-features approach.
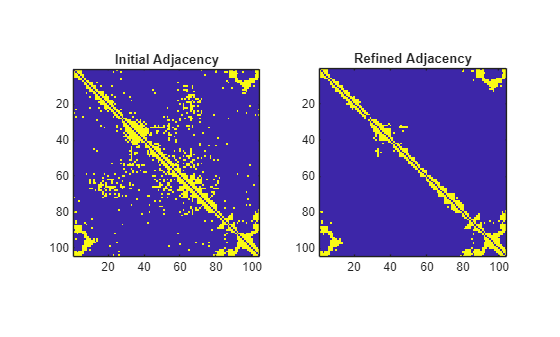
Refine View Graph Using Geometric Verification
Refine the view graph created purely based on visual similarity by verifying geometric consistency between image pairs.
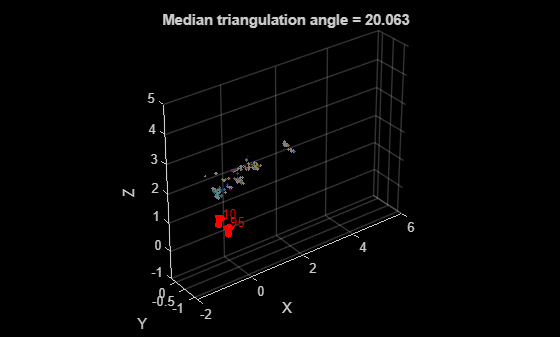
Reconstruct 3-D Scene from Geometrically Refined Pair of Initial Views
Initialize 3-D reconstruction by selecting a robust image pair from the geometrically refined view graph.
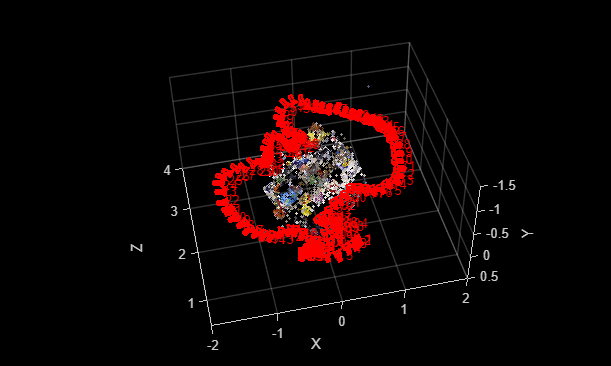
Reconstruct Complete 3-D Scene Using Incremental Structure from Motion
Use incremental structure from motion to generate complete 3-D scene by integrating all camera views with the initialized 3-D reconstruction.

Structure from Motion from Two Views
Estimate 3-D structure of a scene from a set of 2-D images.
Reconstruct 3-D Scenes and Synthesize Novel Views Using Neural Radiance Field Model
Reconstruct 3-D scenes and synthesize novel views from a set of 2-D images using the Nerfacto Neural Radiance Field (NeRF) model.