Simulating Longitudinal and Lateral Vehicle Dynamics
From the series: Improving Your Racecar Development
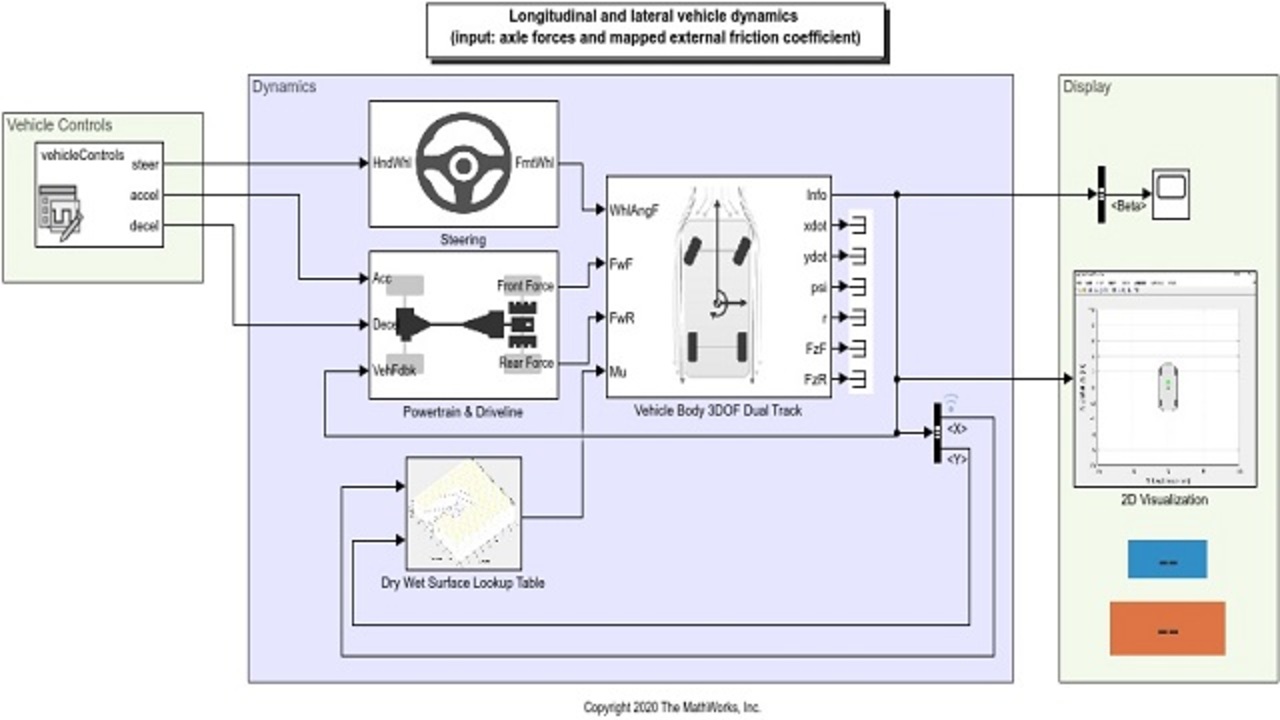
Veer shows how you can simulate longitudinal and lateral vehicle dynamics using Vehicle Dynamics Blockset™. He introduces vehicle blocks that are used for various applications and requirements. He covers how to build vehicle dynamics models using two scenarios: an autonomous vehicle that needs steering input and longitudinal velocity to calculate the motion, and, a race car that needs external forces to calculate the motion. Last, he analyzes the effect of dry and wet surfaces on the vehicle longitudinal, lateral, and yaw motion.
For more information, you can access the following resources:
Published: 20 Dec 2019

Featured Product
Vehicle Dynamics Blockset
Up Next:

Related Videos:








Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: United States.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)