Create System Objects
Write a MATLAB® class that creates and defines
a new System object™
You can define your own System object by customizing the implementation methods. Use graphical tools to explore the comprehensive API for creating System objects. For example, you can insert methods to initialize, run, reset, and terminate System objects. For an introduction to defining a System object, see Define Basic System Objects.
Methods
Functions
sysobjupdate | Update custom System object to latest syntax |
get | Get states and properties of a System object |
set | Set values for properties of a System object |
Classes
matlab.System | Base class for System objects |
matlab.system.mixin.FiniteSource | Class that adds ability to check for the end of finite data source used by System object |
matlab.system.display.Action | Create custom button in Block Parameters dialog box for MATLAB System block |
matlab.system.display.Icon | Specify custom image as icon for MATLAB System block |
matlab.system.display.Header | Specify header and mask type for MATLAB System block |
matlab.system.display.SectionGroup | Create nested groupings of properties in Block Parameters dialog box for MATLAB System block |
matlab.system.display.Section | Create property group section in Block Parameters dialog box for MATLAB System block |
matlab.system.display.Table | Table for MATLAB System block (Since R2026a) |
matlab.system.display.TableColumn | Table column properties for MATLAB System block (Since R2026a) |
Topics
Getting Started Writing System Objects
- Define Basic System Objects
Create a basic System object with the
stepImplmethod.
Property Attributes
- Define Property Attributes
Specify property attributes to limit the type, visibility, and value of properties.
Input and Output
- Change the Number of Inputs
This example shows how to set the number of inputs for a System object™ with and without usinggetNumInputsImpl. - Define Composite System Objects
Define System objects that include other System objects as properties. - Handle Input Specification Changes
Implement methods to restrict when System object input complexity, data type, or size can change or implement a method to react when input specifications change.
Performance and Efficiency
- Tips for Defining System Objects
Tips to speed up slow System objects. - Detailed Call Sequence
Call sequence showing the order of methods when you run a System object. - Define Finite Source Objects
This example shows how to define a System object that performs a specific number of steps or specific number of reads from a file. - Save and Load System Object
Use a MATLAB structure to save and load System object properties and state.
Related Information
- Customize System Objects for Simulink (Simulink)
- System Objects in MATLAB Code Generation (MATLAB Coder)
Featured Examples
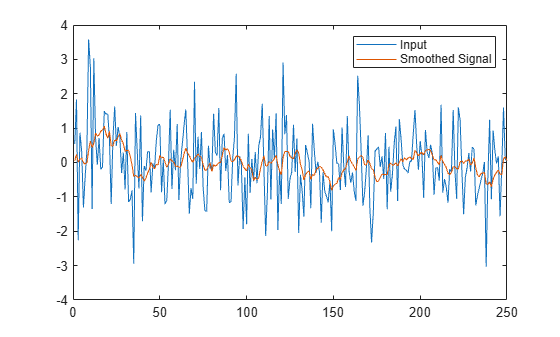
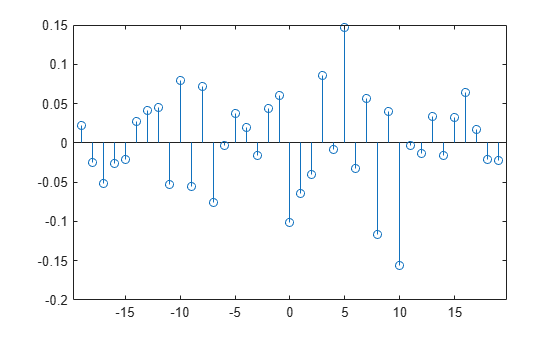
Create Moving Average System Object
Walks through how to create a System object that computes a moving average.

Create New System Objects for File Input and Output
Define new System objects for file input and output.
Create Composite System Object
Create a System object composed of other System objects.