odextend
Extend solution to ODE
Syntax
Description
solext = odextend(sol,odefun,tfinal)sol by integrating odefun from sol.x(end) to tfinal,
using the same ODE solver that created sol. The
function odefun can be different than the original
function used to compute sol. The lower bound for
the independent variable in solext is the same
as in sol, that is, sol.x(1).
By default, odextend uses:
The initial conditions
y = sol.y(:,end)for the subsequent integration.The same integration properties and additional input arguments that the ODE solver originally used to compute
sol. This information is stored in the solution structuresoland is later returned insolext. Unless you want to change these values, you do not need to pass them toodextend.
solext = odextend(sol,odefun,tfinal,y0)y0 for the extended integration
instead of using sol.y(:,end).
For the ode15i solver: y0 must
be an m-by-2 matrix containing column vectors of initial conditions
for the solution components and their derivatives, y0 = [yinit
ypinit].
solext = odextend(sol,odefun,tfinal,y0,options)options, which
is an argument created using the odeset function.
The specified options override the options that the ODE solver originally
used to compute sol. You can optionally specify y0
= [] to use default initial conditions.
Examples
The van der Pol equation is a second order ODE
Solve the van der Pol equation with using ode45. The function vdp1.m ships with MATLAB® and encodes the equations. Specify a single output to return a structure containing information about the solution, such as the solver and evaluation points.
tspan = [0 20]; y0 = [2 0]; sol = ode45(@vdp1,tspan,y0)
sol = struct with fields:
solver: 'ode45'
extdata: [1×1 struct]
x: [0 1.0048e-04 6.0285e-04 0.0031 0.0157 0.0785 0.2844 0.5407 0.8788 1.4032 1.8905 2.3778 2.7795 3.1285 3.4093 3.6657 3.9275 4.2944 4.9013 5.3506 5.7998 6.2075 6.5387 6.7519 6.9652 7.2247 7.5719 8.1226 8.6122 9.1017 9.5054 … ] (1×60 double)
y: [2×60 double]
stats: [1×1 struct]
idata: [1×1 struct]
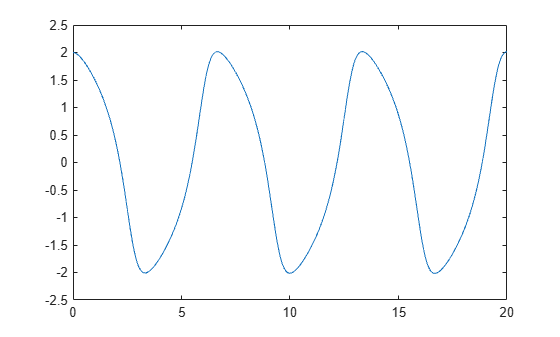
Use linspace to generate 250 points in the interval [0 20]. Evaluate the solution at these points using deval.
x = linspace(0,20,250); y = deval(sol,x);
Plot the first component of the solution.
plot(x,y(1,:))
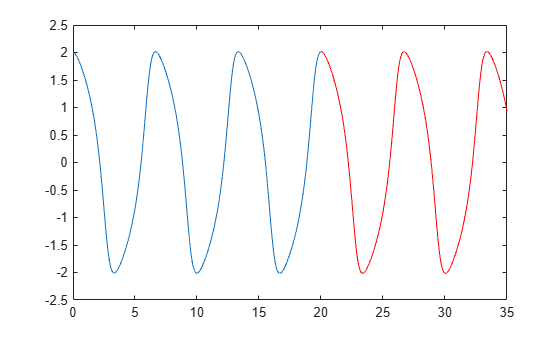
Extend the solution to using odextend and add the result to the original plot.
sol_new = odextend(sol,@vdp1,35); x = linspace(20,35,350); y = deval(sol_new,x); hold on plot(x,y(1,:),'r')
Input Arguments
Output Arguments
Version History
Introduced before R2006a