Signal Previewing
By default, a model predictive controller assumes that the current reference and measured disturbance signals remain constant during the controller prediction horizon. By doing so, the controller emulates a conventional feedback controller.
However, as shown in QP Optimization Problem for Linear MPC, these signals can vary within the prediction horizon. If your application allows you to anticipate trends in such signals, an MPC controller with signal previewing can improve reference tracking, measured disturbance rejection, or both.
The following Model Predictive Control Toolbox™ commands provide previewing options:
For Simulink®, the following blocks support previewing:
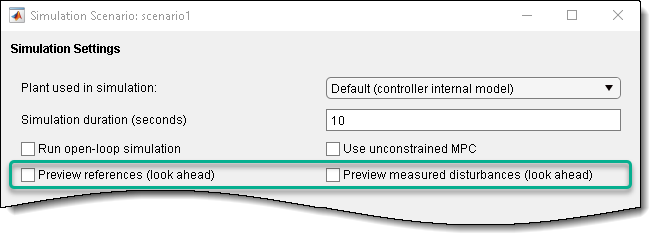
In MPC Designer, you can specify whether simulation scenarios use previewing. When editing a scenario in the Simulation Scenario dialog box, select the Preview references or Preview measured disturbances options.
See Also
Apps
Functions
mpcmove|mpcmoveAdaptive|mpcsimopt|sim