getMapData
Retrieve data from map layer
Syntax
Description
mapData = getMapData(map,bottomLeft,mapSize)map. The
subregion starts in the bottom-left xy-position
bottomLeft in world coordinates with a given map size
mapSize specified as [width height] in
meters.
mapData = getMapData(map,bottomLeft,mapSize,"local")
Examples
Create a map layer that stores two values per grid location as xy-velocities.
Create an m-by-n-by-2 matrix of values. The first element in the third dimension is dx and the second is dy as velocities*.*
dXY = reshape(1:200,10,20); dXY(:,:,2) = dXY;
Create a map layer from the matrix. Specify the resolution and layer name.
vLayer = mapLayer(dXY,'Resolution',1,'LayerName','dXY');
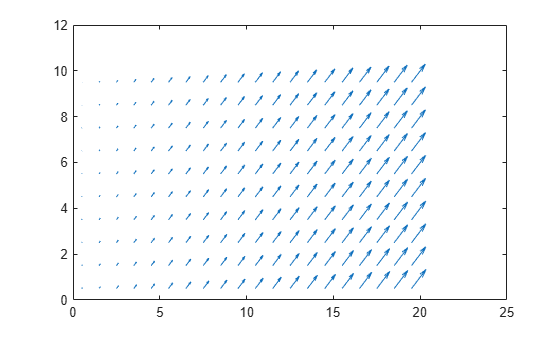
Get all the map data out as a matrix. Get the xy-locations of the velocity values by creating arrays that cover the minimum and maximum xy-world limits and is shifted to the grid-center locations. The y-locations are flipped when converting between matrix to world coordinates. Visualize the velocities corresponding to those grid-center locations using the quiver function.
v = getMapData(vLayer); R = 1/(2*vLayer.Resolution); xLim = vLayer.XWorldLimits; yLim = vLayer.YWorldLimits; xLoc = (xLim(1)+R):R*2:(xLim(2)-R); yLoc = (yLim(2)-R):-R*2:(yLim(1)+R); quiver(xLoc,yLoc,v(:,:,1),v(:,:,2))
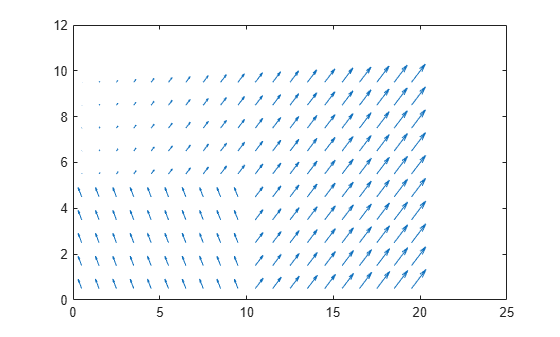
Set the bottom-left quadrant to new updated values. Create the values as a matrix and specify the bottom-left corner (0,0) in map coordinates to the setData function.
updateValues = repmat(reshape([-50,100],[1 1 2]),5,10); setMapData(vLayer,[0 0],updateValues) v = getMapData(vLayer); quiver(xLoc,yLoc,v(:,:,1),v(:,:,2))
Set new values for the top-left quadrant using grid coordinates. For maps, the top-left grid location is (1,1).
setMapData(vLayer,[1 1],updateValues,'grid')
v = getMapData(vLayer);
quiver(xLoc,yLoc,v(:,:,1),v(:,:,2))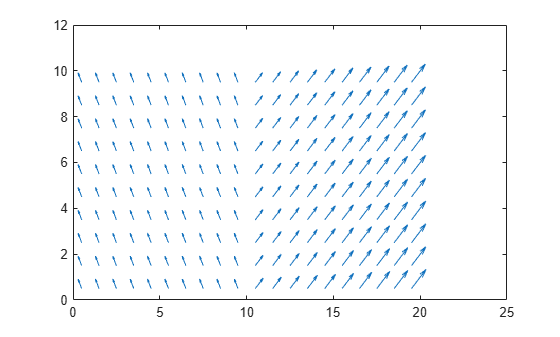
The mapLayer object enables you to apply custom element-wise transformations when setting and getting data in the map. To transform data you set or get from the map, specify function handles for the GetTransfomFcn and SetTransformFcn properties. This example shows how to implement a log-odds probabilistic map layer by creating a lookup table for probability and log-odds values. The transform functions use these lookup tables to convert between these values when setting or getting data.
Create Lookup Tables
Generate a full lookup table of values that map the probability values to the minimum and maximum limits of int16 values.
Create an array of int16 values from intmin to intmax. Define the probability limits.
intType = 'int16';
intLinSpace = intmin(intType):intmax(intType);
numOfPoints = length(intLinSpace);
probLimits = [0.001 0.999];The exampleHelperProbToLogodds and examplerHelperLogoddsToProb functions convert between the log-odds and probability values. Use the helper functions to get the log-odds limits and generate the array for looking up log-odds values. Create an interpolated grid for the entire lookup table.
logOddsLimits = exampleHelperProbToLogodds([0.001 0.999]);
logOddsLookup = single(exampleHelperLogoddsToProb(linspace(logOddsLimits(1),logOddsLimits(2),numOfPoints)));
interpTable = griddedInterpolant(logOddsLookup,single(intLinSpace),'nearest');Specify Transform Function Handles
The transform function handles utilize example helpers that define how to convert between log-odds integer values and the probability values with an applied saturation limit. The probability saturation limits are [0.001 .999] as previously specified. This behavior is similar to the occupancyMap object.
getXformFcn = @(obj,logodds,varargin)... exampleHelperIntLogoddsToProb(logodds,logOddsLookup(:),intLinSpace); setXformFcn = @(obj,prob,varargin)... exampleHelperProbToIntLogodds(prob,interpTable,logOddsLookup(:),intLinSpace,probLimits);
Create Map Layer
Generate an occupancy map layer object from a matrix of probability values. Specify the get and set transform functions.
occupancyLayer = mapLayer(repmat(0.5,10,10),... 'LayerName','Occupancy',... 'GetTransformFcn',getXformFcn,... 'SetTransformFcn',setXformFcn);
Notice that when you create the map, the default value is 0.001 instead of 0. This difference is because the SetTransformFcn function has been applied to the default value of 0 when you create the object, which saturates the value to 0.001.
disp(occupancyLayer.DefaultValue)
0.0010
Get and Set Map Data
The map data matches the matrix you set on creation.
extData = getMapData(occupancyLayer)
extData = 10×10
0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000
0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000
0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000
0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000
0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000
0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000
0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000
0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000
0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000
0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000 0.5000
Set specific map locations to values that are:
Outside of the probability saturation limits.
Higher precision than the resolution of the lookup tables.
setMapData(occupancyLayer,[0 0],0.00001) setMapData(occupancyLayer,[5 5],0.25999)
For the first location, the probability is bound to the saturation limits.
extData = getMapData(occupancyLayer,[0 0])
extData = 0.0010
The second location returns the value closest to the probability value in the lookup table.
extData2 = getMapData(occupancyLayer,[5 5])
extData2 = 0.2600
The generated map layer can now be used for updating a probability occupancy map that are stored as int16 values. To combine this map with other layers or map types, see the multiLayerMap object.