rmi
Work programmatically with Requirements Toolbox
Syntax
Description
Get Link Information
linkedDest = rmi("get",modelOrBlock)modelOrBlock.
numLinks = rmi("count",modelOrBlock)modelOrBlock.
descriptions = rmi("descriptions",modelOrBlock)modelOrBlock.
codeComments = rmi("codeComment",modelOrBlock)modelOrBlock. Requirements Toolbox™ inserts these comments in the generated code when you generate code
from the model. For more information, see Trace Requirements to Code Generated from Models.
linkedDest = rmi("codeReqs",modelOrBlock)modelOrBlock. If the model element
is a referenced instance of a block from a Simulink® library, the link destinations include links from the library block as
well as the reference block. If the model element is not a reference instance of a
block from a Simulink library, the output of this function is the same as the output of
rmi("get",. For more
information about referenced instances of library blocks, see Linked Blocks (Simulink)modelOrBlock)
Delete Links
rmi("clearAll", opens a
dialog box that prompts you to delete the outgoing links from the top-level model or
model element.modelOrBlock)
rmi("clearAll", opens a
dialog box that prompts you to delete the outgoing links from the model.model,"deep")
rmi(___,"noPrompt") deletes the outgoing links
without opening a dialog box. Use one of the previous two syntaxes, followed by the
argument noPrompt.
Work with Models
rmi("embed", moves externally
stored links to the model file specified by model)model. For more
information about link storage for models, see Link from Simulink Model Elements.
[
moves links stored in the model to an external SLMX file in the same folder as the
model and returns the number of linked model elements,
numElements,numLinks] = rmi("export",model)numElements, and the number of outgoing links,
numLinks. For more information about link storage for models,
see Link from Simulink Model Elements.
rmi("highlightModel", highlights
the model elements that have outgoing links in the model specified by
model)model.
[
returns the block handles, blockHandles,modelIndices,isSf,objSIDs] = rmi("getObjectsInModel",model)blockHandles, the model hierarchy
indices, parentIndices, indicators for whether or not the model
element belongs to a Stateflow® chart, isSf, and the model element SIDs,
objSIDs, for each model element in the model specified by
model.
[
returns the name and type for the model or model element specified by
modelOrBlockName,modelOrBlockType] = rmi("getObjLabel",modelOrBlock)modelOrBlock.
guidChar = rmi("guidGet",modelOrBlock)modelOrBlock. If modelOrBlock does not
have a globally unique identifier, the function creates one. Only REQ files use
globally unique identifiers.
Report Traceability
rmi("report", generates
a traceability report in HTML format for the artifact specified by
artifactToReport)artifactToReport. For more information about traceability
reports, see Create and Customize Requirements Traceability Reports.
rmi projectReport generates a traceability report in HTML
format for the files in the current project. The top-level page of this report has
links to reports for each project file that has outgoing links. For more information,
see Create Requirements Traceability Report for Projects.
Integrate with Third-Party Tools
rmi register
registers the custom document interface specified by the registration function
myCustomDocInterfacemyCustomDocInterface, which enables you to create direct
links to requirements in a third-party application that Requirements Toolbox does not provide built-in support for. For more information, see Define Custom Document Interface for Direct Linking to Requirements.
rmi unregister
unregisters the custom document interface specified by the registration function
myCustomDocInterfacemyCustomDocInterface. For more information, see Define Custom Document Interface for Direct Linking to Requirements.
rmi httpLink activates an internal HTTP server that you can
use to navigate to linked items in MATLAB® or Simulink from backlinks in a browser-based third-party requirements tool that
uses HTTP protocol. Backlink navigation on the HTTPS server is enabled by
default.
Note
Alternatively, you can active the internal HTTP server by using the
rmipref function and setting the UnsecureHttpRequests preference to true. When
the UnsecureHttpRequests preference is
true, MATLAB activates the internal HTTP server on startup.
connectorStatus = rmi("httpLink","status")0, the server is not active.
rmi setup prompts you at the command line to configure
Requirements Toolbox for interaction with Microsoft® Office and IBM®
DOORS®. For more information, see Configure Requirements Toolbox for Interaction with Microsoft Office and IBM DOORS.
rmi setup doors prompts you at the command line to configure
Requirements Toolbox for interaction with IBM
DOORS. For more information, see Configure Requirements Toolbox for Interaction with Microsoft Office and IBM DOORS.
rmi("doorsSync", opens the
IBM
DOORS synchronization settings dialog box for the Simulink model specified by model)model. For more information
about IBM
DOORS synchronization, see Synchronize Requirements Traceability in IBM DOORS by Using Surrogate Modules.
currentSettings = rmi("doorsSync",model,"settings")model. To change the settings,
use the IBM
DOORS synchronization settings dialog box to make changes, then click
Save settings.
Tip
To return the default settings, specify model as
[].
rmi("doorsSync",
uses the synchronization settings specified by model,syncSettings)syncSettings to
create an IBM
DOORS surrogate module from the Simulink model specified by model. If an IBM
DOORS surrogate module already exists, this function re-synchronizes the
model and module and updates the surrogate module. For more information about
IBM
DOORS synchronization, see Synchronize Requirements Traceability in IBM DOORS by Using Surrogate Modules.
numScreenshots = rmi("surrogateUpdateScreenshots",model)
currentTemplate = rmi("getDoorsLabelTemplate")
tf = rmi("setDoorsLabelTemplate",customTemplate)customTemplate and returns the
success status. The default label template contains
the section number and object heading for the DOORS requirement link target.
Tip
To revert the link label template to the default template, enter this code at the MATLAB command prompt:
tf = rmi("setDoorsLabelTemplate","")
label = rmi("doorsLabel",moduleID,doorsReqID)doorsReqID in the module
specified by moduleID.
numUpdatedLinkLabels = rmi("updateDoorsLabels",model)model and outputs the
number of link labels updated. The function uses the current link label template,
currentTemplate.
Check Links for Validity and Consistency
validationProblems = rmi("checkDoc")
validationProblems = rmi("checkDoc",docName)docName, returns the number of link validation problems
detected, and opens a link validation report for the document. For more information,
see Validate Requirements Links in a Requirements Document.
consistencyProblems = rmi("check",artifactToCheck)artifactToCheck and opens a link consistency report for the
file. For more information, see Check Direct Links for Validity.
Examples
Open the CruiseRequirementsExample project. Load the crs_controller model.
openProject("CruiseRequirementsExample"); model = "crs_controller"; load_system(model);
Get the link destination for the Switch block in the OpMode subsystem of the CruiseControlMode subsystem.
modelElement = model+"/CruiseControlMode/opMode/Switch"; linkedDest = rmi("get",modelElement)
linkedDest = struct with fields:
doc: 'crs_req_func_spec.slreqx'
id: '25'
linked: 1
description: '#25: Precedence of mode determination'
keywords: ''
reqsys: 'linktype_rmi_slreq'
Open the CruiseRequirementsExample project and load the crs_controller model.
openProject("CruiseRequirementsExample"); model = "crs_controller"; load_system(model)
Get the block handles and Stateflow® IDs for model elements that have outgoing links.
[blockHandles,sfIDs] = rmi("getHandlesWithRequirements",model);Create a variable called modelElement and assign the first block handle as the value.
modelElement = blockHandles(1);
Get the number of links from the model element.
numLinks = rmi("count",modelElement)numLinks = 1
Get the link description for the link.
desc = rmi("descriptions",modelElement)desc = 1×1 cell array
{'#19: Cruise Control Mode'}
Get the code comment that corresponds to the linked requirement.
codeComment = rmi("codeComment",modelElement)codeComment =
'* 1. Cruise Control Mode
* 2. [crs_controllerdic.sldd:brake_threshold] Threshold value for brake pressure
* 3. [crs_controllerdic.sldd:tsp_max] Maximum Target Speed
* 4. [crs_controllerdic.sldd:tsp_min] Minimum Target Speed'
Get the link destinations for the links that Requirements Toolbox™ includes in the generated code for the model from the model element.
linkedDest = rmi("codeReqs",modelElement)linkedDest=4×1 struct array with fields:
doc
id
linked
description
keywords
reqsys
Open the CruiseRequirementsExample project and load the crs_controller and crs_plant models.
openProject("CruiseRequirementsExample"); model1 = "crs_controller"; load_system(model1); model2 = "crs_plant"; load_system(model2);
Delete Links from Model Elements
Get the model elements in the crs_controller model that have outgoing links.
[blockHandles,sfIDs] = rmi("getHandlesWithRequirements",model1);Inspect the link for the first model element.
modelElement = blockHandles(1);
linkedDest = rmi("get",modelElement)linkedDest = struct with fields:
doc: 'crs_req_func_spec.slreqx'
id: '19'
linked: 1
description: '#19: Cruise Control Mode'
keywords: ''
reqsys: 'linktype_rmi_slreq'
Delete the links from the first model element by following the prompts.
rmi("clearAll",modelElement)Confirm that you deleted the link.
linkedDest = rmi("get",modelElement)linkedDest =
[]
Inspect the link for the second model element.
modelElement = blockHandles(2);
linkedDest = rmi("get",modelElement)linkedDest = struct with fields:
doc: 'crs_req_func_spec.slreqx'
id: '36'
linked: 1
description: '#36: Disabling override'
keywords: ''
reqsys: 'linktype_rmi_slreq'
Delete the links from the second model element without opening a dialog box.
rmi("clearAll",modelElement,"noprompt")
Confirm that you deleted the link.
linkedDest = rmi("get",modelElement)linkedDest =
[]
Delete Links from Models
Get the model elements in the crs_controller model that have outgoing links.
[blockHandles,~] = rmi("getHandlesWithRequirements",model1)blockHandles = 62×1
103 ×
0.3390
0.3500
0.3660
0.3820
0.3870
0.3920
0.4390
0.4860
0.4910
0.4960
0.5010
0.5080
0.5140
0.5180
0.5200
⋮
Delete the outgoing links from the crs_controller model by following the prompts.
rmi("clearAll",model1,"deep")
Confirm that you deleted the links.
[blockHandles,~] = rmi("getHandlesWithRequirements",model1)blockHandles = 0×1 empty double column vector
Get the model elements in the crs_plant model that have outgoing links.
[blockHandles,~] = rmi("getHandlesWithRequirements",model2)blockHandles = 5×1
103 ×
2.1430
2.1450
2.1470
2.1490
2.4120
Delete the outgoing links from the crs_controller model by following the prompts.
rmi("clearAll",model2,"deep","noprompt")
Confirm that you deleted the links.
[blockHandles,~] = rmi("getHandlesWithRequirements",model2)blockHandles = 0×1 empty double column vector
Open the CruiseRequirementsExample project and load the crs_controller model.
openProject("CruiseRequirementsExample"); model = "crs_controller"; load_system(model);
Highlight the model elements that have outgoing links and open the model.
rmi("highlightModel",model)
open_system(model);
Turn off highlighting in the model.
rmi("unhighlightModel",model)
Open the CruiseRequirementsExample project. Load the crs_controller model.
openProject("CruiseRequirementsExample"); model = "crs_controller"; load_system(model);
Get the globally unique identifier for the enbl inport.
modelElement = model+"/enbl"; guID = rmi("guIDGet",modelElement)
guID = 'GIDa_0e727df2_2b9a_43de_a62a_634b394505e4'
Get the numeric block handle from the globally unique identifier for the model element.
handle = rmi("guidlookup",model,guID)handle = 151.0002
Open the CruiseRequirementsExample project. Load the crs_controller model.
openProject("CruiseRequirementsExample"); model = "crs_controller"; load_system(model);
Get the objects in the crs_controller model.
[blockHandles,modelIndices,isSf,objSIDs] = rmi( ... "getObjectsInModel",model);
Get the block name and block type for the 13th model element.
modelElement = blockHandles(13);
[blockName,blockType] = rmi("getObjLabel",modelElement)blockName = 'CruiseControlMode'
blockType = 'SubSystem'
Open the CruiseRequirementsExample project. Load the crs_controller model.
openProject("CruiseRequirementsExample"); model = "crs_controller"; load_system(model);
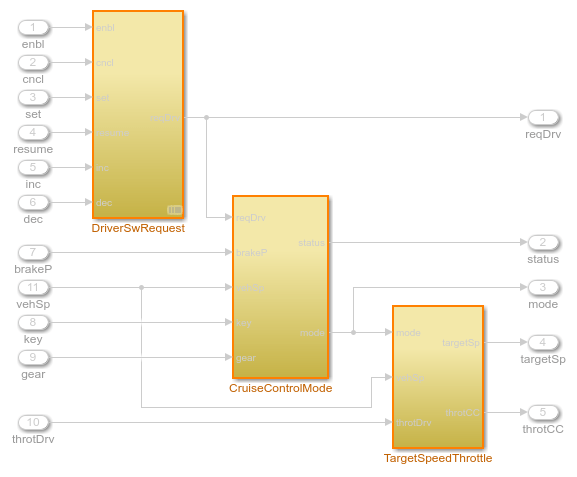
Generate a traceability report for the crs_controller model.
rmi("report",model) Beginning report
Looping on model "crs_controller"
Looping on system "CruiseControlMode"
Looping on system "DriverSwRequest"
Looping on system "TargetSpeedThrottle"
Looping on system "disableCaseDetection"
Looping on system "opMode"
Looping on system "outOfRange"
Looping on system "decrement"
Looping on system "doNot Repeat"
Looping on system "increment"
Looping on system "activated"
Looping on system "disabled"
Looping on system "enabled"
Looping on system "targetSpeed"
Looping on system "IsKeyPositionOn"
Looping on system "IsShiftDrive"
Looping on system "isbrake"
Looping on system "IncrementDecrement"
Looping on system "activateCondition"
Looping on system "disableCondition"
Looping on system "enableCondition"
Looping on system "resumeCondition"
Looping on system "counter"
Looping on system "getNewTargetSpeed"
Looping on system "getThrottleValue"
Looping on system "PI controller"
"chapter" contains no content and will not be inserted into document
Converting report
Report complete
Generate a traceability report for the project.
rmi projectReport Beginning report
Converting report
Report complete
C:\Users\user\OneDrive - MathWorks\Documents\MATLAB\ExampleManager\user.examples\slrequirements-ex31589479\CruiseRequirementsExample\data\crs_controllerdic.sldd done.
Beginning report
Looping on model "crs_controller"
Looping on system "CruiseControlMode"
Looping on system "DriverSwRequest"
Looping on system "TargetSpeedThrottle"
Looping on system "disableCaseDetection"
Looping on system "opMode"
Looping on system "outOfRange"
Looping on system "decrement"
Looping on system "doNot Repeat"
Looping on system "increment"
Looping on system "activated"
Looping on system "disabled"
Looping on system "enabled"
Looping on system "targetSpeed"
Looping on system "IsKeyPositionOn"
Looping on system "IsShiftDrive"
Looping on system "isbrake"
Looping on system "IncrementDecrement"
Looping on system "activateCondition"
Looping on system "disableCondition"
Looping on system "enableCondition"
Looping on system "resumeCondition"
Looping on system "counter"
Looping on system "getNewTargetSpeed"
Looping on system "getThrottleValue"
Looping on system "PI controller"
"chapter" contains no content and will not be inserted into document
Converting report
Report complete
C:\Users\user\OneDrive - MathWorks\Documents\MATLAB\ExampleManager\user.examples\slrequirements-ex31589479\CruiseRequirementsExample\models\crs_controller.slx done.
Beginning report
Looping on model "crs_plant"
Looping on system "crs_plant"
Looping on system "Vehicle1"
Looping on chart "shift_logic"
Looping on and state "gear_state"
Looping on and state "selection_state"
Looping on or state "fourth"
Looping on or state "third"
Looping on or state "second"
Looping on or state "first"
Looping on or state "steady_state"
Looping on or state "upshifting"
Looping on or state "downshifting"
"chapter" contains no content and will not be inserted into document
Converting report
Report complete
C:\Users\user\OneDrive - MathWorks\Documents\MATLAB\ExampleManager\user.examples\slrequirements-ex31589479\CruiseRequirementsExample\models\crs_plant.slx done.
Beginning report
Running FOR loop, RPTGEN_LOOP = 1
Converting report
Report complete
C:\Users\user\OneDrive - MathWorks\Documents\MATLAB\ExampleManager\user.examples\slrequirements-ex31589479\CruiseRequirementsExample\tests\DriverSwRequest_Tests.mldatx done.
Beginning report
Exception during eval : Insufficient number of outputs from right hand side of equal sign to satisfy assignment.
Variable "rmi_table_data" does not exist in workspace
"chapter" contains no content and will not be inserted into document
"chapter" contains no content and will not be inserted into document
Converting report
Report complete
Register a custom document interface that enables direct linking to requirements in Microsoft® PowerPoint® presentations.
rmi register customPowerPointInterface
Unregister the interface.
rmi unregister customPowerPointInterface
Get the internal HTTP server status.
status = rmi("httpLink","status")
status = struct with fields:
httpPort: 0
httpsPort: 31515
Activate the internal HTTP server.
rmi httpLinkGet the internal HTTP server status.
status = rmi("httpLink","status")
status = struct with fields:
httpPort: 31415
httpsPort: 31515
Configure Requirements Toolbox for interaction with Microsoft Office and IBM DOORS.
rmi setupEnsuring required Active-X controls ..
Verifying MATLAB automation server path ..
Register this MATLAB installation as ActiveX Automation Server? (Y/N):_y
Registering this MATLAB executable as an automation server ..
Welcome to the DOORS-MATLAB Interface setup utility.
This will perform all the steps necessary so that you
can start using Simulink and Stateflow with IBM DOORS.
NOTE: You should close IBM DOORS before continuing with
this installation.
Checking Windows Registry to locate IBM DOORS installation(s)...
Please select IBM DOORS installation to configure for MATLAB:
[1] 9.6 C:\Program Files\IBM\Rational\DOORS\9.6\
If your target IBM DOORS Client installation is not listed above,
select one of the following options:
[2] Manually enter IBM DOORS installation directory
[3] Exit, making no changes
[4] Make no changes in IBM DOORS directory but ensure IBM DOORS integration is enabled in MATLAB
Selection: 1
C:\Program Files\IBM\Rational\DOORS\9.6\lib\dxl\addins\dmi\dmi.inc is up to date.Configure Requirements Toolbox™ for interaction with IBM DOORS by executing this code:
rmi setup doors
Open DOORS Project
In this example, you use the faultTolerantControlSystem.dpa file in IBM DOORS, which contains requirements modules that describe a fault-tolerant control system.
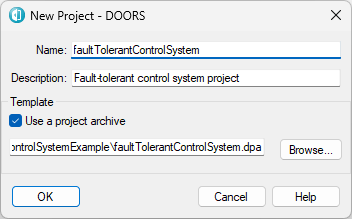
In IBM DOORS, create a new project:
Select File > New > Project.
In the New Project dialog box, set Name to
faultTolerantControlSystem.In the Description field, enter
Fault-tolerant control system project.Select Use a project archive.
Click Browse and select
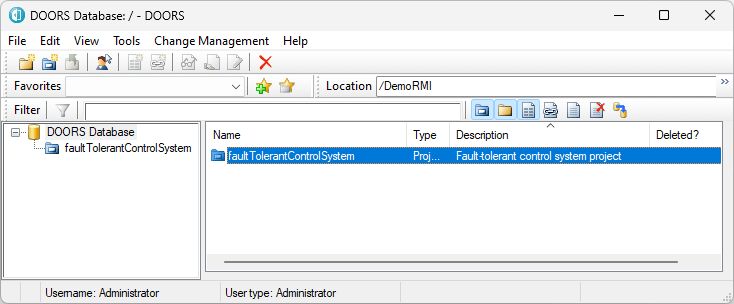
faultTolerantControlSystem.dpa.Click OK to create the project.
Get the Synchronization Settings
Open the faultTolerantControlSystem model.
model = "faultTolerantControlSystem";Get the current synchronization settings for the model.
currentSettings = rmi("doorsSync",model,"settings")
currentSettings = struct with fields:
surrogatePath: '/faultTolerantControlSystem/faultTolerantControlSystem'
detailLevel: 4
doorsToSl: 0
slToDoors: 1
purgeSimulink: 0
purgeDoors: 1
saveModel: 1
saveSurrogate: 1
Set the value of the detailLevel field to 4.
currentSettings.detailLevel = 4;
Create the Surrogate Module
Create the surrogate module.
rmi("doorsSync",model,currentSettings)Verifying MATLAB automation server path .. Registering this MATLAB executable as an automation server ..
Add screenshots to the model.
numScreenshots = rmi("surrogateUpdateScreenshots",model) Beginning report
Looping on system "faultTolerantControlSystem"
Looping on system "engine gas dynamics"
Looping on system "Mixing & Combustion"
Looping on system "system lag"
Looping on system "Throttle & Manifold"
Looping on system "Intake Manifold"
Looping on system "Throttle"
Looping on system "fuel rate controller"
Looping on system "Airflow calculation"
Looping on system "Fuel Calculation"
Looping on system "Switchable Compensation"
Looping on system "LOW Mode"
Looping on system "RICH Mode"
Looping on system "Sensor correction and Fault Redundancy"
Looping on system "MAP Estimate"
Looping on system "Speed Estimate"
Looping on system "Throttle Estimate"
Looping on chart "control logic"
Converting report
Report complete
Using ./snapshots_html_files/image-001-sl.png for faultTolerantControlSystem
Missing screenshot for faultTolerantControlSystem/Test inputs
Using ./snapshots_html_files/image-003-sl.png for faultTolerantControlSystem/engine
gas
dynamics
Using ./snapshots_html_files/image-005-sl.png for faultTolerantControlSystem/engine
gas
dynamics/Mixing & Combustion
Using ./snapshots_html_files/image-007-sl.png for faultTolerantControlSystem/engine
gas
dynamics/Mixing & Combustion/system lag
Using ./snapshots_html_files/image-009-sl.png for faultTolerantControlSystem/engine
gas
dynamics/Throttle & Manifold
Using ./snapshots_html_files/image-011-sl.png for faultTolerantControlSystem/engine
gas
dynamics/Throttle & Manifold/Intake Manifold
Using ./snapshots_html_files/image-013-sl.png for faultTolerantControlSystem/engine
gas
dynamics/Throttle & Manifold/Throttle
Using ./snapshots_html_files/image-015-sl.png for faultTolerantControlSystem/fuel rate
controller
Using ./snapshots_html_files/image-017-sl.png for faultTolerantControlSystem/fuel rate
controller/Airflow calculation
Using ./snapshots_html_files/image-019-sl.png for faultTolerantControlSystem/fuel rate
controller/Fuel Calculation
Using ./snapshots_html_files/image-021-sl.png for faultTolerantControlSystem/fuel rate
controller/Fuel Calculation/Switchable
Compensation
Using ./snapshots_html_files/image-023-sl.png for faultTolerantControlSystem/fuel rate
controller/Fuel Calculation/Switchable
Compensation/LOW Mode
Using ./snapshots_html_files/image-025-sl.png for faultTolerantControlSystem/fuel rate
controller/Fuel Calculation/Switchable
Compensation/RICH Mode
Using ./snapshots_html_files/image-027-sl.png for faultTolerantControlSystem/fuel rate
controller/Sensor correction and
Fault Redundancy
Using ./snapshots_html_files/image-029-sl.png for faultTolerantControlSystem/fuel rate
controller/Sensor correction and
Fault Redundancy/MAP Estimate
Using ./snapshots_html_files/image-031-sl.png for faultTolerantControlSystem/fuel rate
controller/Sensor correction and
Fault Redundancy/Speed Estimate
Using ./snapshots_html_files/image-033-sl.png for faultTolerantControlSystem/fuel rate
controller/Sensor correction and
Fault Redundancy/Throttle Estimate
Using ./snapshots_html_files/image-035-sf.png for faultTolerantControlSystem/fuel rate
controller/control logic
Processed 19 subsystems, 0 items added in module 0000010e
numScreenshots = 19
Load the faultTolerantControlSystem model.
model = "faultTolerantControlSystem";
load_system(model)Open the IBM DOORS synchronization settings dialog box for the model.
rmi("doorsSync",model)Configure Requirements Toolbox™ for interaction with IBM® DOORS® by executing this code:
rmi setup doors
Load the slvnvdemo_fuelsys_doorsreq model. Get a handle to the link set for the model.
model = "slvnvdemo_fuelsys_doorsreq";
load_system(model);
myLinkSet = slreq.load(model);Open DOORS Project
In this example, you use the faultTolerantControlSystem.dpa file in IBM DOORS, which contains requirements modules that describe the fault-tolerant control system.
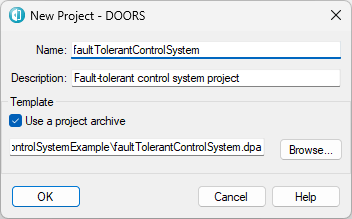
In IBM DOORS, create a new project:
Select File > New > Project.
In the New Project dialog, set Name to
faultTolerantControlSystem.In the Description field, enter
Fault-tolerant control system project.Select Use a project archive.
Click Browse and select
faultTolerantControlSystem.dpa.Click OK to create the project.
Redirect Links for DOORS Project
Redirect the links to point to the IBM DOORS module IDs in the new project.
In IBM DOORS, open the faultTolerantControlSystem project.
Open the faultTolerantControlSystem module and select a requirement. Get the module ID for the requirement. Update the link destinations to point to the faultTolerantControlSystem module in the new project.
newModuleID = rmidoors.getCurrentObj;
oldModuleID = "00000160";
count = updateDocUri(myLinkSet,oldModuleID,newModuleID)count = 235
Open the FuelSys Design Description module and select a requirement. Get the module ID for the requirement. Update the link destinations to point to the FuelSys Design Description module in the new project.
newModuleID = rmidoors.getCurrentObj;
oldModuleID = "00000161";
count = updateDocUri(myLinkSet,oldModuleID,newModuleID)count = 6
Open the FuelSys Requirements Specification module and select a requirement. Get the module ID for the requirement. Update the link destinations to point to the FuelSys Requirements Specification module in the new project.
newModuleID = rmidoors.getCurrentObj;
oldModuleID = "00000141";
count = updateDocUri(myLinkSet,oldModuleID,newModuleID)count = 1
Get and Set Link Label Template
Get the current label template for links to requirements in IBM DOORS.
currentTemplate = rmi("getDoorsLabelTemplate")currentTemplate = '%M:%h'
Set the template to display the module name and the object heading, separated by a colon.
customTemplate = "%M:%h"; tf = rmi("setDoorsLabelTemplate",customTemplate)
tf = logical
0
Confirm that you updated the link label template.
currentTemplate = rmi("getDoorsLabelTemplate")currentTemplate = '%M:%h'
Update Link Labels
Get the link label for requirement number 27 in the FuelSys Requirements Specification module based on the current template.
doorsReqID = "27"; newModuleID = "00000101"; label = rmi("doorsLabel",newModuleID,doorsReqID)
label = 'FuelSys Requirements Specification:Normal Mode of Operation'
Load the slvnvdemo_fuelsys_doorsreq model, then update the link labels for the outgoing links from the model to requirements in IBM DOORS.
model = "slvnvdemo_fuelsys_doorsreq"; load_system(model); numUpdatedLinks = rmi("updateDoorsLabels",model)
slvnvdemo_fuelsys_doorsreq/fuel rate controller/throttle (Inport):
changing "1.1.1.1 Throttle Sensor" to "FuelSys Design Description:Throttle Sensor"
slvnvdemo_fuelsys_doorsreq/fuel rate controller/MAP (Inport):
changing "1.1.1.2 Manifold Absolute Pressure Sensor " to "FuelSys Design Description:Manifold Absolute Pressure Sensor"
slvnvdemo_fuelsys_doorsreq/fuel rate controller/Airflow calculation (SubSystem):
changing "1.2.1 Mass airflow estimation " to "FuelSys Design Description:Mass airflow estimation"
slvnvdemo_fuelsys_doorsreq/.../Sensor correction and Fault Redundancy/MAP Estimate (SubSystem):
changing "1.3.1.3 Manifold pressure failure mode " to "FuelSys Design Description:Manifold pressure failure mode"
slvnvdemo_fuelsys_doorsreq/.../Sensor correction and Fault Redundancy/Speed Estimate (SubSystem):
changing "2.2.6 Speed Sensor Failure" to "FuelSys Requirements Specification:Speed Sensor Failure"
slvnvdemo_fuelsys_doorsreq/.../control logic/Rich_Mixture (State):
changing "1.3.1.2 Enriched mixture usage " to "FuelSys Design Description:Enriched mixture usage"
slvnvdemo_fuelsys_doorsreq/.../control logic/[speed==0 & press < zero_thresh]/ Fail.INC (Transition):
changing "1.3.1.4 Speed sensor failure detection " to "FuelSys Design Description:Speed sensor failure detection"
numUpdatedLinks = 7
This example shows how to interactively check links for validity.
Note
You can only run this example on Windows® platforms.
Open the Link and Navigate to Requirements in Excel from Simulink Blocks example.
openExample(['slrequirements/' ... 'LinkRequirementsInExcelToSimulinkBlocksExample'])
Open the slvnvdemo_FuelSys_TestScenarios
Microsoft
Excel document.
doc = which("slvnvdemo_FuelSys_TestScenarios.xlsx");
winopen(doc);Check the links to the document for validity. Follow the prompts in the Command Window.
validationProblems = rmi("checkDoc")Please choose target document type:
1 - Microsoft Word document
2 - Microsoft Excel document
3 - DOORS module
[1,2,3]? 2
Microsoft Excel document to check: (current)
Checking 'C:/Users/jdoe/MATLAB/slrequirements-ex78700367/slvnvdemo_FuelSys_TestScenarios.xlsx' (Y/n) ? y
Reading "C:/Users/jdoe/MATLAB/slrequirements-ex78700367/slvnvdemo_FuelSys_TestScenarios.xlsx" ...
found 2 links
validationProblems =
1Open the slvnvdemo_FuelSys_TestScenarios Microsoft® Excel® document.
doc = which("slvnvdemo_FuelSys_TestScenarios.xlsx");
winopen(doc);Check the links for validity.
validationProblems = rmi("checkDoc",doc)Reading "C:/Users/jdoe/MATLAB/slrequirements-ex78700367/slvnvdemo_FuelSys_TestScenarios.xlsx" ... found 2 links
validationProblems = 1
Open the ShortestPath example.
openProject("ShortestPath");Check the links from the shortest_path MATLAB® code file for consistency.
artifactToCheck = "shortest_path.m"; consistencyProblems = rmi("check",artifactToCheck)
consistencyProblems = 4×1
0
0
11
0
This example shows how to programmatically change where requirements links are stored for a model.
The requirements links for the slvnvdemo_fuelsys_officereq_internal model are stored in the model. Export the links to an external file.
[linkedElements,numLinks] = rmi("export","slvnvdemo_fuelsys_officereq_internal")
linkedElements = 15
numLinks = 15
Move the links back into the model.
rmi("embed","slvnvdemo_fuelsys_officereq_internal");
Input Arguments
Output Arguments
Alternatives
The
getSimulinkBlockHandle(Simulink) function returns numeric handles for blocks and does not require the globally unique identifier that is required by this syntax:handle = rmi("guidLookup",model,guid)To generate a report for requirement sets, you can use the
slreq.generateReportfunction. For more information, see Report Requirements Information. This report is an alternative to the traceability report generated byrmi("report",artifactToReport)andrmi projectReport.