Perception
Learn how you can use MATLAB® and Simulink® to design perception systems for robots and unmanned vehicles. MathWorks experts share their knowledge of topics such as computer vision, deep learning, and signal processing with a focus on helping robots and unmanned systems understand what’s in their surroundings. This video series will also feature student teams that have successfully used MATLAB and Simulink for perception.

Obstacle Avoidance Using a Camera Sensor
Learn how to autonomously navigate your vehicle through obstacles with the help of a front-facing camera using an optical flow algorithm.

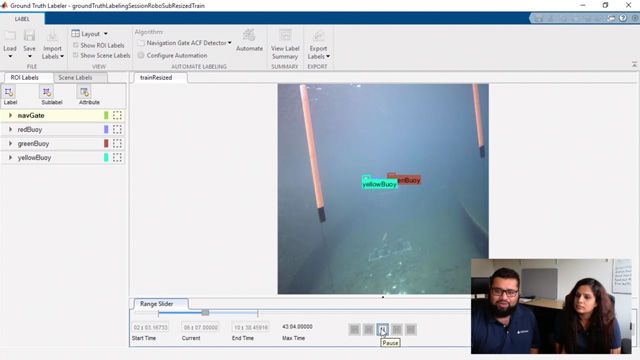
Labeling Ground Truth for Object Detection
Use the Ground Truth Labeler app to generate quality ground truth data that can be used to train and evaluate object detectors.

Training and Validating Object Detectors
Use labeled ground truth data to train and evaluate object detectors.

Sensor Fusion for Orientation Estimation
Join Roberto Valenti and Connell D’Souza as they discuss using Sensor Fusion and Tracking Toolbox to perform sensor fusion for orientation estimation.

Designing Digital Filters with MATLAB
Digital Filters are a fundamental component of digital signal processing. As demonstrated by Mark Schwab, MATLAB and Simulink provide an app to design filters for digital signal processing called the Filter Designer app.

Estimating Direction of Arrival with MATLAB
Stephen Cronin from the Robotics Association at Embry-Riddle Aeronautical University demonstrates how to detect the direction of arrival of an underwater acoustic signal using MATLAB.
Data Preprocessing for Deep Learning
Learn how to resize images, create labeled training, validation, and test datasets to train and test object detection models, as Neha Goel joins Connell D’Souza to talk about data preprocessing for deep learning.

Design and Train a YOLOv2 Network in MATLAB
Neha Goel joins Connell D’Souza to talk about designing and training a YOLOv2 real-time object detection neural network.

Import Pretrained Deep Learning Networks into MATLAB
Neha Goel joins Connell D’Souza to demonstrate how to use Open Neural Network Exchange (ONNX) to import pretrained deep learning networks into MATLAB and perform transfer learning.

Deploy YOLOv2 to an NVIDIA Jetson
Connell D’Souza joins Neha Goel to talk about using GPU Coder to deploy a YOLOv2 object detection model to an NVIDIA Jetson.

Mass Estimation for Robot Manipulators
Include weight information from grasped objects in your robot manipulation algorithms by implementing fault-based estimations that can reconstruct the weight of an object from existing robot information.

Understanding and Processing Point Clouds
Learn what point clouds are, how they are collected, and how to process them with the Lidar Viewer app.

Labeling Point Clouds with the Lidar Labeler App
Learn how to interactively label point clouds for 3D object detection using the Lidar Labeler app.

Deep Learning with Point Clouds
Learn how to use a labeled data set of point clouds to train a 3D object detector.

Deploying a 3D Object Detector
Learn how to deploy your 3D object detector to hardware as a static library or as an ROS 2 node.