Video Player is loading.
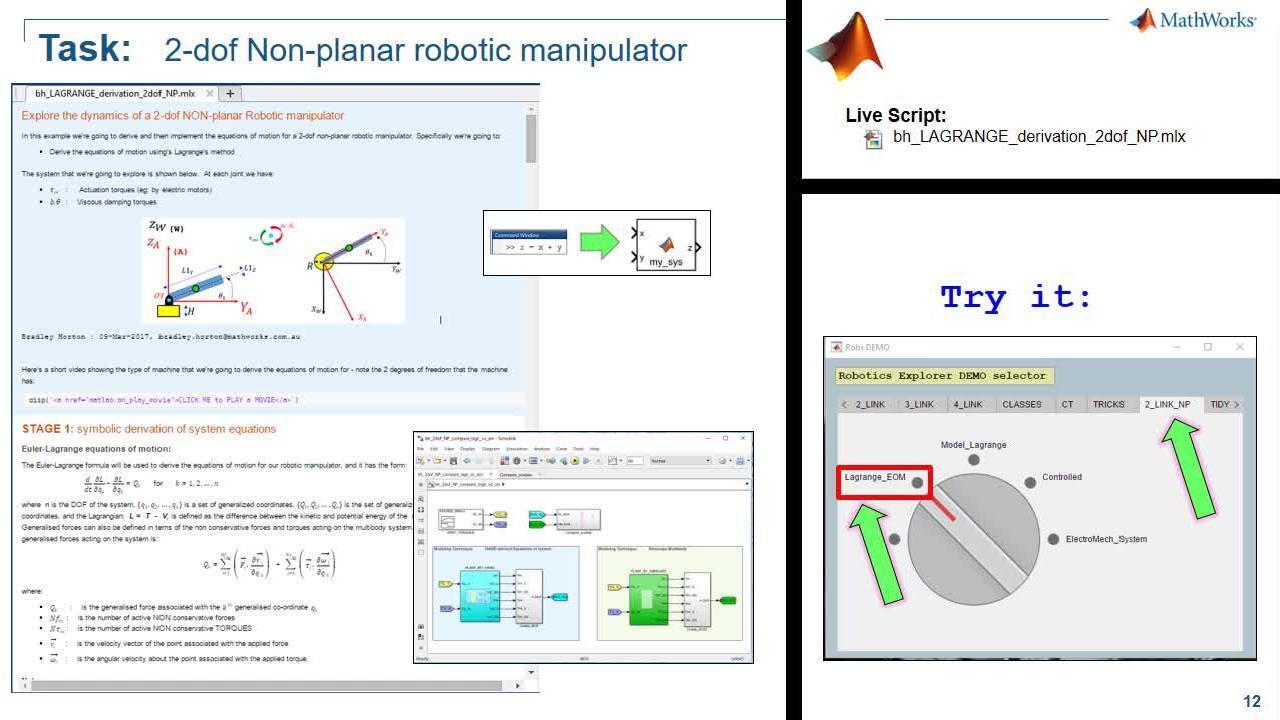
Two-Degrees-of-Freedom Non-Planar Robotic Manipulator Case Study | Teaching Rigid Body Dynamics, Part 3
From the series: Teaching Rigid Body Dynamics
The workflow pattern introduced in the first case study in this series is reapplied to a larger two-degree-of-freedom system.
Published: 30 Oct 2017











Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: United States.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)