bistaticReceiver
Description
bistaticReceiver creates a bistatic receiver object. Bistatic radar
systems have separate transmitter and receiver elements that are not co-located. To create a
bistatic radar that supports synchronous, asynchronous, and multiple transmitter and receiver
pairs, use bistaticTransmitter in conjunction with
bistaticReceiver.
Receive signals from the bistatic receiver by calling the receive object
function. Optionally collect and coherently combine signals using the collect object
function prior to calling receive. The nextTime object
function returns the start time of the next receive window.
For a typical bistatic workflow, construct the bistatic transmitter using
bistaticTransmitter and construct the bistatic receiver using
bistaticReceiver. Then, transmit the waveform by calling
transmit on the bistatic transmitter. Finally, call receive on the
bistatic receiver to receive the propagated signal returned by transmit.
For a more advanced workflow that supports multiple transmitters and parallelization, call
collect on the
bistatic receiver to coherently combine the transmitted signal returned by
transmit prior to calling receive. See Transmit, Collect, and Receive Timing Visualization for more information on
simulation timing and using information provided by nextTime.
Creation
Description
RX = bistaticReceiverRX, that is used to receive
signals transmitted by bistaticTransmitter. Call
receive on RX to generate samples from
transmitted signals collected by the receive antenna and propagated through the
receiver.
RX = bistaticReceiver(PropertyName=Value)RX, with each specified
PropertyName set to the corresponding Value.
You can specify additional pairs of arguments in any order as
PropertyName1=Value1,...,PropertyNameN=ValueN.
Properties
Object Functions
Examples
This example shows how to create a bistatic scenario with two bistatic transmitters. The receiver is located between the transmitters and there is a target with a custom radar cross section. Transmit and collect pulses for four receive windows and plot the results.
Configure the bistatic transmitters. Use a pulse repetition frequency of 1000 Hz.
prf = 1e3; wav = phased.LinearFMWaveform(PRF=prf,PulseWidth=0.2/prf); ant = phased.SincAntennaElement(Beamwidth=10); tx1 = bistaticTransmitter(Waveform=wav, ... Transmitter=phased.Transmitter(Gain=40), ... TransmitAntenna=phased.Radiator(Sensor=ant)); tx2 = clone(tx1); prf = 2e3; tx2.Waveform = phased.RectangularWaveform( ... PRF=prf,PulseWidth=0.2/prf); tx2.Transmitter.PeakPower = 2e3;
Configure the bistatic receiver.
rx = bistaticReceiver( ... ReceiveAntenna=phased.Collector(Sensor=ant), ... WindowDuration=0.0025); freq = tx1.TransmitAntenna.OperatingFrequency;
Create bistatic transmitter platforms spaced 10 km apart. Put the receiver platform between the two transmitters. For this example, create the platforms in radarScenario. Define the platforms using platform.
scene = radarScenario(UpdateRate=prf); tx1Plat = platform(scene,Position=[-5e3 0 0], ... Orientation=rotz(85).'); tx2Plat = platform(scene,Position=[5e3 0 0], ... Orientation=rotz(95).'); rxPlat = platform(scene,Position=[0 0 0], ... Orientation=rotz(90).');
Place a stationary target platform down range and assign the target a radar cross section.
rcsSig = rcsSignature(Pattern=20);
tgtPlat = platform(scene,Position=[0 50e3 0], ...
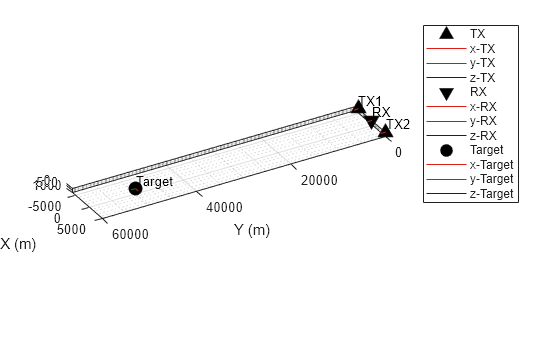
Signatures=rcsSig);Show platform locations and orientations.
tp = theaterPlot(Parent=axes(figure)); txPltr = orientationPlotter(tp,Marker="^", ... DisplayName="TX",LocalAxesLength=1e3); rxPltr = orientationPlotter(tp,Marker="v", ... DisplayName="RX",LocalAxesLength=1e3); tgtPltr = orientationPlotter(tp,Marker="o", ... DisplayName="Target",LocalAxesLength=1e3); poses = platformPoses(scene); plotOrientation(txPltr,[poses(1:2).Orientation], ... reshape([poses(1:2).Position],3,[]).',["TX1" "TX2"]); plotOrientation(rxPltr,poses(3).Orientation,poses(3).Position,"RX"); plotOrientation(tgtPltr,poses(4).Orientation,poses(4).Position,"Target");
Transmit and collect pulses for four receive windows. First, update platform positions by calling advance on the scene. Then set up the for loop to iterate over the receive windows. Next, get platform positions using platformPoses. Get the propagation paths for both transmitters using bistaticFeeSpacePath. Then, transmit the signal and collect pulses. Finally, receive the transmissions and plot the received signals.
tl = tiledlayout(figure,2,1); hAxes = [nexttile(tl) nexttile(tl)]; hold(hAxes,"on"); tx = {tx1 tx2}; advance(scene); for iRxWin = 0:4 [propSigs,propInfo] = collect(rx,scene.SimulationTime); t = min([nextTime(tx{1}) nextTime(tx{2})]); tEnd = nextTime(rx); while t <= tEnd % Get platform positions poses = platformPoses(scene); % Include target RCS signature on the pose tgtPose = poses(4); tgtPose.Signatures = {rcsSig}; for iTx = 1:2 % Calculate propogation paths proppaths = bistaticFreeSpacePath(freq, ... poses(iTx),poses(3),tgtPose); % Transmit [txSig,txInfo] = transmit(tx{iTx},proppaths,scene.SimulationTime); % Plot transmitted signal txTimes = (0:(size(txSig,1) - 1))*1/txInfo.SampleRate ... + txInfo.StartTime; plot(hAxes(1),txTimes*1e3,mag2db(max(abs(txSig),[],2)),SeriesIndex=iTx); % Collect transmitted pulses collectSigs = collect(rx,txSig,txInfo,proppaths); % Accumulate collected transmissions sz = max([size(propSigs);size(collectSigs)],[],1); propSigs = paddata(propSigs,sz) + paddata(collectSigs,sz); end t = min([nextTime(tx{1}) nextTime(tx{2})]); advance(scene); end % Receive collected transmissions [iq,rxInfo] = receive(rx,propSigs,propInfo); % Plot received transmissions rxTimes = (0:(size(iq,1) - 1))*1/rxInfo.SampleRate ... + rxInfo.StartTime; plot(hAxes(2),rxTimes*1e3,mag2db(abs(iq))); end
Label plots.
grid(hAxes,"on") title(hAxes(1),"Transmitter Signals") title(hAxes(2),"Receiver Signals") xlabel(hAxes,"Time (milliseconds)") ylabel(hAxes,"Power (dB)") ylim(hAxes(1),[0 80]); ylim(hAxes(2),[-130 -75]) xlim(hAxes(1),xlim(hAxes(2)))

This example shows how to create a simple bistatic scenario with a moving target. Transmit and collect pulses until the completion of 1 receive window and plot the results.
Configure the bistatic transmitter and receiver. Use a pulse repetition frequency of 1000 Hz.
prf = 1e3; wav = phased.LinearFMWaveform(PRF=prf,PulseWidth=1e-5); ant = phased.SincAntennaElement(Beamwidth=10); tx = bistaticTransmitter(Waveform=wav, ... Transmitter=phased.Transmitter(Gain=20), ... TransmitAntenna=phased.Radiator(Sensor=ant)); rx = bistaticReceiver( ... ReceiveAntenna=phased.Collector(Sensor=ant), ... WindowDuration=0.005); freq = tx.TransmitAntenna.OperatingFrequency;
Create bistatic transmitter and bistatic receiver platforms spaced 10 km apart and add a target platform. Use radarScenario to create the platforms for this example. Define the transmitter platform, receiver platform, and target platform using platform and give the target a trajectory.
scene = radarScenario(UpdateRate=prf); platform(scene,Position=[-5e3 0 0], ... Orientation=rotz(45).'); platform(scene,Position=[5e3 0 0], ... Orientation=rotz(135).'); traj = kinematicTrajectory( ... Position=8e3*[cosd(60) sind(60) 0],Velocity=[0 150 0]); tgtPlat= platform(scene,Trajectory=traj);
Create an empty plot.
hFig = figure; hAxes = axes(hFig);
Transmit and collect pulses for one receive window. First, update platform positions by calling advance on the scene and then get the platform positions using platformPoses. Next, get the propagation paths using bistaticFeeSpacePath. Then, transmit the signal and receive pulses. Finally, plot the received signals.
t = nextTime(tx); tEnd = nextTime(rx); while t < tEnd advance(scene); % Get platform positions poses = platformPoses(scene); % Calculate paths proppaths = bistaticFreeSpacePath(freq, ... poses(1),poses(2),poses(3)); % Transmit [txSig,txInfo] = transmit(tx,proppaths,t); % Receive pulses [iq,rxInfo] = receive(rx,txSig,txInfo,proppaths); t = nextTime(tx); % Plot received signals rxTimes = (0:(size(iq,1) - 1))*1/rxInfo.SampleRate ... + rxInfo.StartTime; plot(hAxes,rxTimes,mag2db(abs(sum(iq,2)))) hold(hAxes,'on') end
Label the plot.
grid(hAxes,'on') xlabel(hAxes,'Time (sec)') ylabel(hAxes,'Power (dB)') axis(hAxes,'tight')

More About
Version History
Introduced in R2025a