Inertial Sensor Fusion
Use inertial sensor fusion algorithms to estimate orientation and position over time. The algorithms are optimized for different sensor configurations, output requirements, and motion constraints. You can directly fuse IMU data from multiple inertial sensors. You can also fuse IMU data with GPS data.
Functions
Blocks
| AHRS | Orientation from accelerometer, gyroscope, and magnetometer readings |
| IMU Filter | Estimate orientation using IMU Filter (Since R2023b) |
| ecompass | Compute orientation from accelerometer and magnetometer readings (Since R2024a) |
| Complementary Filter | Estimate orientation using complementary filter (Since R2023a) |
Topics
- Choose Inertial Sensor Fusion Filters
Applicability and limitations of various inertial sensor fusion filters.
- Fuse Inertial Sensor Data Using insEKF-Based Flexible Fusion Framework
The
insEKFfilter object provides a flexible framework that you can use to fuse inertial sensor data. - Determine Orientation Using Inertial Sensors
Fuse inertial measurement unit (IMU) readings to determine orientation.
- Estimate Orientation Through Inertial Sensor Fusion
This example shows how to use 6-axis and 9-axis fusion algorithms to compute orientation.
- Determine Pose Using Inertial Sensors and GPS
Use Kalman filters to fuse IMU and GPS readings to determine pose.
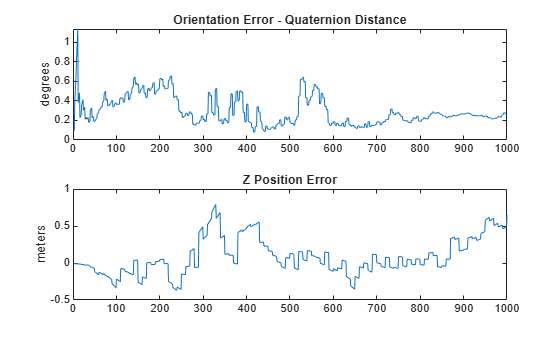
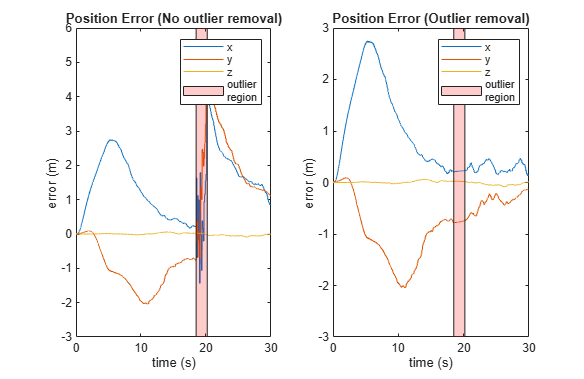
- Logged Sensor Data Alignment for Orientation Estimation
This example shows how to align and preprocess logged sensor data.
Featured Examples

IMU and GPS Fusion for Inertial Navigation
How you might build an IMU + GPS fusion algorithm suitable for unmanned aerial vehicles (UAVs) or quadcopters.
Estimate Orientation and Height Using IMU, Magnetometer, and Altimeter
Fuse data from a 3-axis accelerometer, 3-axis gyroscope, 3-axis magnetometer (together commonly referred to as a MARG sensor for Magnetic, Angular Rate, and Gravity), and 1-axis altimeter to estimate orientation and height.

Pose Estimation from Asynchronous Sensors
How you might fuse sensors at different rates to estimate pose. Accelerometer, gyroscope, magnetometer and GPS are used to determine orientation and position of a vehicle moving along a circular path. You can use controls on the figure window to vary sensor rates and experiment with sensor dropout while seeing the effect on the estimated pose.
Detect Multipath GPS Reading Errors Using Residual Filtering in Inertial Sensor Fusion
Use the residualgps object function and residual filtering to detect when new sensor measurements may not be consistent with the current filter state.

Automatic Tuning of the insfilterAsync Filter
The insfilterAsync object is a complex extended Kalman filter that estimates the device pose. However, manually tuning the filter or finding the optimal values for the noise parameters can be a challenging task. This example illustrates how to use the tune function to optimize the filter noise parameters.

Custom Tuning of Fusion Filters
Use the tune function to optimize the noise parameters of several fusion filters, including the ahrsfilter object. This example shows how to customize a cost function for various optimization goals.

IMU Sensor Fusion with Simulink
Generate and fuse IMU sensor data using Simulink®. You can accurately model the behavior of an accelerometer, a gyroscope, and a magnetometer and fuse their outputs to compute orientation.

Design Fusion Filter for Custom Sensors
Introduces how to customize sensor models used with an insEKF object.

Estimate Orientation Using GPS-Derived Yaw Measurements
Define and use a custom sensor model for the insEKF object along with built-in sensor models. Using a custom yaw angle sensor, an accelerometer, and a gyroscope, this example uses the insEKF object to determine the orientation of a vehicle. You use the velocity from a GPS receiver to compute the yaw of the vehicle. Following a similar approach as shown in this example, you can develop custom sensor models for your own sensor fusion applications.

Ground Vehicle Pose Estimation for Tightly Coupled IMU and GNSS
Estimate the position and orientation of a ground vehicle by building a tightly coupled extended Kalman filter and using it to fuse sensor measurements. A tightly coupled filter fuses inertial measurement unit (IMU) readings with raw global navigation satellite system (GNSS) readings. In contrast, a loosely coupled filter fuses IMU readings with filtered GNSS receiver readings.