ode45
Solve nonstiff differential equations — medium order method
Syntax
Description
[,
where t,y] =
ode45(odefun,tspan,y0)tspan = [t0 tf], integrates the system of
differential equations from t0 to tf with
initial conditions y0. Each row in the solution
array y corresponds to a value returned in column
vector t.
All MATLAB® ODE solvers can solve systems of equations of
the form ,
or problems that involve a mass matrix, .
The solvers all use similar syntaxes. The ode23s solver
only can solve problems with a mass matrix if the mass matrix is constant. ode15s and ode23t can
solve problems with a mass matrix that is singular, known as differential-algebraic
equations (DAEs). Specify the mass matrix using the Mass option
of odeset.
ode45 is a versatile ODE solver and is the
first solver you should try for most problems. However, if the problem
is stiff or requires high accuracy, then there are other ODE solvers
that might be better suited to the problem. See Choose an ODE Solver for
more information.
[ additionally
finds where functions of (t,y),
called event functions, are zero. In the output, t,y,te,ye,ie]
= ode45(odefun,tspan,y0,options)te is
the time of the event, ye is the solution at the
time of the event, and ie is the index of the triggered
event.
For each event function, specify whether the integration is
to terminate at a zero and whether the direction of the zero crossing
matters. Do this by setting the 'Events' property
to a function, such as myEventFcn or @myEventFcn,
and creating a corresponding function: [value,isterminal,direction]
= myEventFcn(t,y).
For more information, see ODE Event Location.
Examples
Simple ODEs that have a single solution component can be specified as an anonymous function in the call to the solver. The anonymous function must accept two inputs (t,y), even if one of the inputs is not used in the function.
Solve the ODE
Specify a time interval of [0 5] and the initial condition y0 = 0.
tspan = [0 5]; y0 = 0; [t,y] = ode45(@(t,y) 2*t, tspan, y0);
Plot the solution.
plot(t,y,'-o')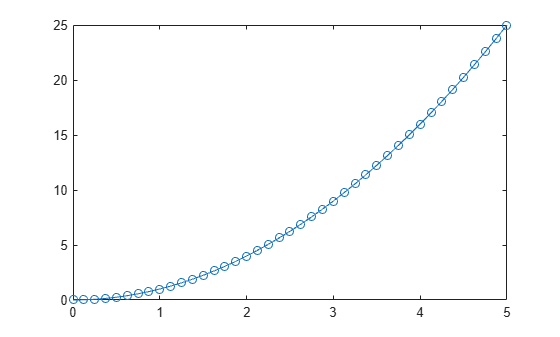
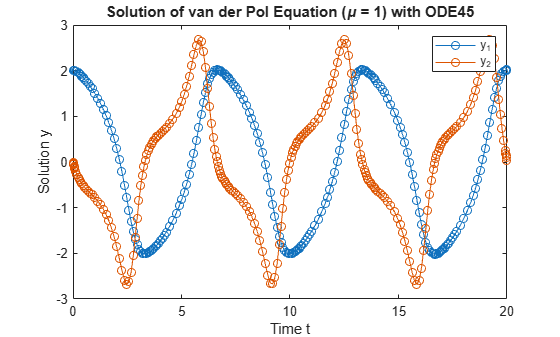
The van der Pol equation is a second-order ODE
where is a scalar parameter. Rewrite this equation as a system of first-order ODEs by making the substitution . The resulting system of first-order ODEs is
The function file vdp1.m represents the van der Pol equation using . The variables and are the entries y(1) and y(2) of a two-element vector dydt.
function dydt = vdp1(t,y) %VDP1 Evaluate the van der Pol ODEs for mu = 1 % % See also ODE113, ODE23, ODE45. % Jacek Kierzenka and Lawrence F. Shampine % Copyright 1984-2014 The MathWorks, Inc. dydt = [y(2); (1-y(1)^2)*y(2)-y(1)];
Solve the ODE using the ode45 function on the time interval [0 20] with initial values [2 0]. The resulting output is a column vector of time points t and a solution array y. Each row in y corresponds to a time returned in the corresponding row of t. The first column of y corresponds to , and the second column corresponds to .
[t,y] = ode45(@vdp1,[0 20],[2; 0]);
Plot the solutions for and against t.
plot(t,y(:,1),'-o',t,y(:,2),'-o') title('Solution of van der Pol Equation (\mu = 1) with ODE45'); xlabel('Time t'); ylabel('Solution y'); legend('y_1','y_2')
ode45 works only with functions that use two input arguments, t and y. However, you can pass extra parameters by defining them outside the function and passing them in when you specify the function handle.
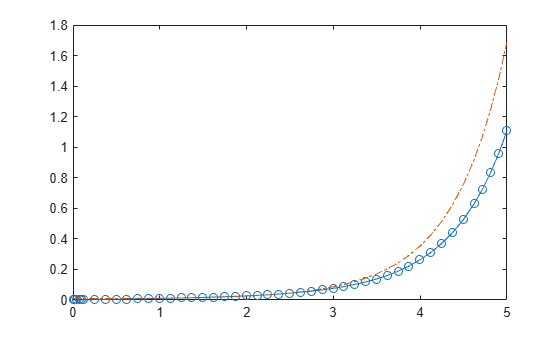
Solve the ODE
Rewriting the equation as a first-order system yields
odefcn, a local function included at the end of this example, represents this system of equations as a function that accepts four input arguments: t, y, A, and B.
function dydt = odefcn(t,y,A,B) dydt = zeros(2,1); dydt(1) = y(2); dydt(2) = (A/B)*t.*y(1); end
Solve the ODE using ode45. Specify the function handle so that it passes the predefined values for A and B to odefcn.
A = 1; B = 2; tspan = [0 5]; y0 = [0 0.01]; [t,y] = ode45(@(t,y) odefcn(t,y,A,B), tspan, y0);
Plot the results.
plot(t,y(:,1),'-o',t,y(:,2),'-.')
function dydt = odefcn(t,y,A,B) dydt = zeros(2,1); dydt(1) = y(2); dydt(2) = (A/B)*t.*y(1); end
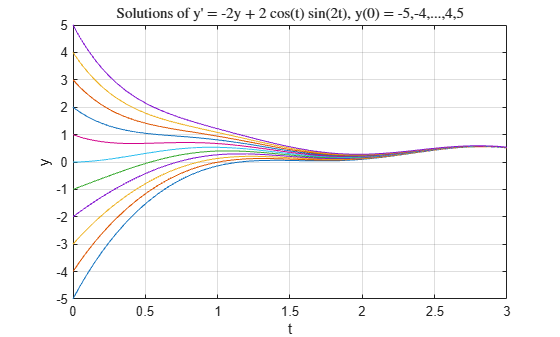
For simple ODE systems with one equation, you can specify y0 as a vector containing multiple initial conditions. This technique creates a system of independent equations through scalar expansion, one for each initial value, and ode45 solves the system to produce results for each initial value.
Create an anonymous function to represent the equation . The function must accept two inputs for t and y.
yprime = @(t,y) -2*y + 2*cos(t).*sin(2*t);
Create a vector of different initial conditions in the range .
y0 = -5:5;
Solve the equation for each initial condition over the time interval using ode45.
tspan = [0 3]; [t,y] = ode45(yprime,tspan,y0);
Plot the results.
plot(t,y) grid on xlabel('t') ylabel('y') title('Solutions of y'' = -2y + 2 cos(t) sin(2t), y(0) = -5,-4,...,4,5','interpreter','latex')
This technique is useful for solving simple ODEs with several initial conditions. However, the technique also has some tradeoffs:
You cannot solve systems of equations with multiple initial conditions. The technique only works when solving one equation with multiple initial conditions.
The time step chosen by the solver at each step is based on the equation in the system that needs to take the smallest step. This means the solver can take small steps to satisfy the equation for one initial condition, but the other equations, if solved on their own, would use different step sizes. Despite this, solving for multiple initial conditions at the same time is generally faster than solving the equations separately using a
for-loop.
For more information on this technique, see Solve System of ODEs with Multiple Initial Conditions.
Consider the following ODE with time-dependent parameters

The initial condition is  . The function
. The function f(t) is defined by the n-by-1 vector f evaluated at times ft. The function g(t) is defined by the m-by-1 vector g evaluated at times gt.
Create the vectors f and g.
ft = linspace(0,5,25); f = ft.^2 - ft - 3; gt = linspace(1,6,25); g = 3*sin(gt-0.25);
Write a function named myode that interpolates f and g to obtain the value of the time-dependent terms at the specified time. Save the function in your current folder to run the rest of the example.
The myode function accepts extra input arguments to evaluate the ODE at each time step, but ode45 only uses the first two input arguments t and y.
function dydt = myode(t,y,ft,f,gt,g) f = interp1(ft,f,t); % Interpolate the data set (ft,f) at time t g = interp1(gt,g,t); % Interpolate the data set (gt,g) at time t dydt = -f.*y + g; % Evaluate ODE at time t
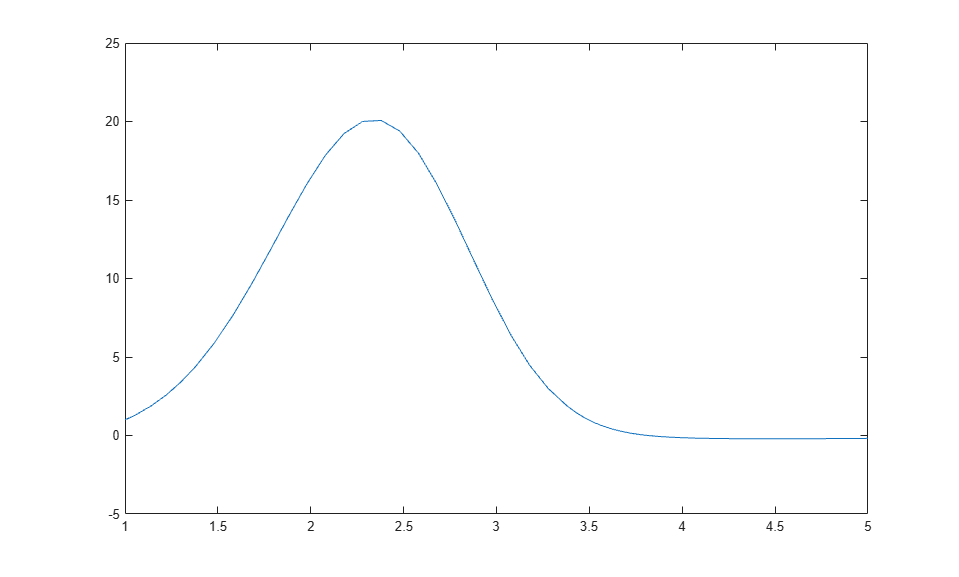
Solve the equation over the time interval [1 5] using ode45. Specify the function using a function handle so that ode45 uses only the first two input arguments of myode. Also, loosen the error thresholds using odeset.
tspan = [1 5]; ic = 1; opts = odeset('RelTol',1e-2,'AbsTol',1e-4); [t,y] = ode45(@(t,y) myode(t,y,ft,f,gt,g), tspan, ic, opts);
Plot the solution, y, as a function of the time points, t.
plot(t,y)
The van der Pol equation is a second order ODE
Solve the van der Pol equation with using ode45. The function vdp1.m ships with MATLAB® and encodes the equations. Specify a single output to return a structure containing information about the solution, such as the solver and evaluation points.
tspan = [0 20]; y0 = [2 0]; sol = ode45(@vdp1,tspan,y0)
sol = struct with fields:
solver: 'ode45'
extdata: [1×1 struct]
x: [0 1.0048e-04 6.0285e-04 0.0031 0.0157 0.0785 0.2844 0.5407 0.8788 1.4032 1.8905 2.3778 2.7795 3.1285 3.4093 3.6657 3.9275 4.2944 4.9013 5.3506 5.7998 6.2075 6.5387 6.7519 6.9652 7.2247 7.5719 8.1226 8.6122 9.1017 9.5054 … ] (1×60 double)
y: [2×60 double]
stats: [1×1 struct]
idata: [1×1 struct]
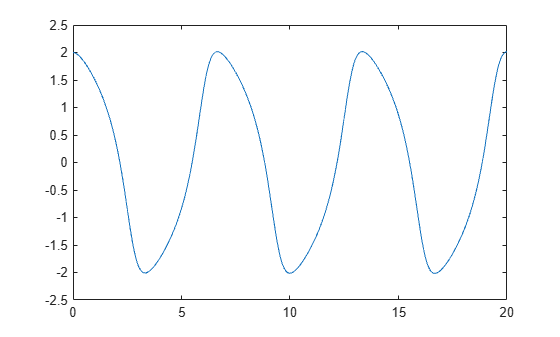
Use linspace to generate 250 points in the interval [0 20]. Evaluate the solution at these points using deval.
x = linspace(0,20,250); y = deval(sol,x);
Plot the first component of the solution.
plot(x,y(1,:))
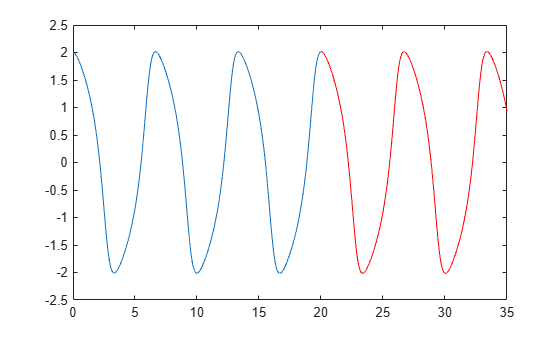
Extend the solution to using odextend and add the result to the original plot.
sol_new = odextend(sol,@vdp1,35); x = linspace(20,35,350); y = deval(sol_new,x); hold on plot(x,y(1,:),'r')
Input Arguments
Output Arguments
Algorithms
ode45 is based on an explicit Runge-Kutta
(4,5) formula, the Dormand-Prince pair. It is a single-step solver
– in computing y(tn),
it needs only the solution at the immediately preceding time point, y(tn-1) [1], [2].
References
[1] Dormand, J. R. and P. J. Prince, “A family of embedded Runge-Kutta formulae,” J. Comp. Appl. Math., Vol. 6, 1980, pp. 19–26.
[2] Shampine, L. F. and M. W. Reichelt, “The MATLAB ODE Suite,” SIAM Journal on Scientific Computing, Vol. 18, 1997, pp. 1–22.
Extended Capabilities
Version History
Introduced before R2006a